Source
When it comes to replicating the 5 senses that we humans have in robots, both sight and hearing can be said to dominate them well in a certain way but with regard to the rest of the senses of smell, taste and touch, they are completely unable to use them.
Cuando se trata de replicar los 5 sentidos que poseemos los humanos en los robots, tanto la vista como el oído se puede decir que en cierta manera los dominan bien pero en lo que se refiere al resto de los sentidos olfato, gusto y tacto, son completamente incapaces de utilizarlos.
Any human being, especially those who are blind, is able to identify the objects enclosed, for example in a bag, and simply by touching them, recognize the shape, texture and position of any object from its earliest childhood without any problem.
Cualquier ser humano, sobre todo aquellas personas que son invidentes, es capaz de identificar los objetos encerrados, por ejemplo en una bolsa, y simplemente tocándolos, reconocer la forma, la textura y la posición de cualquier objeto desde su mas tierna infancia sin mayores problemas.
Source
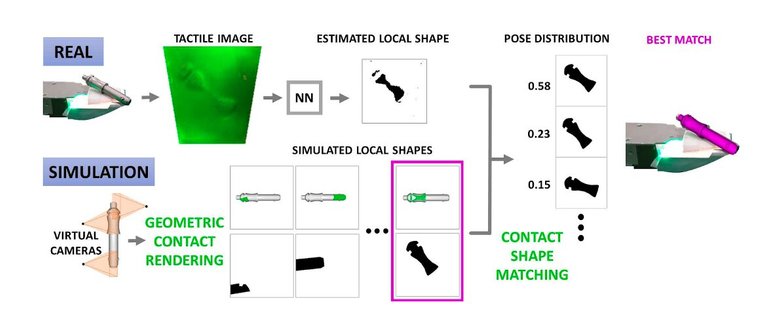
To alleviate these deficiencies, a group of MIT scientists have carried out a study dedicated to equipping robots with a high-resolution tactile detection system, to be able to detect the position of objects simply by touching them.
Para ir paliando estas estas carencias un grupo de científicos del MIT han llevado a cabo un estudio dedicado a dotar a los robots con un sistema de detección táctil de alta resolución, para poder detectar la posición de los objetos simplemente tocándolos.
Although there are already more works related to this topic, this approach of the MIT team goes a bit further by not relying on other types of detection such as the image or using previously stored data on the characteristics of the objects to be identified but is based exclusively in what it is touching.
Aunque ya existen más trabajos relacionados con este tema, este enfoque del equipo del MIT va un poco más allá al no apoyarse en otros tipos de detección como la imagen ni utilizar datos previos almacenados sobre las características de los objetos a identificar sino que se basa exclusivamente en lo que está tocando.
Source
Of course, this tactile ability can be combined with those already implemented for vision and sound identification, which will notably increase the abilities of robots, especially in industrial environments, where vision can be blocked by some other object and be able to know the shape and position of an objet only by touching is very helpful.
Por supuesto esta habilidad táctil puede combinarse con las ya implementadas de visión e identificación de sonidos, lo que incrementará notablemente las habilidades de los robots sobre todo en entornos industriales, donde la visión se puede ver bloqueada por algún otro objeto y poder conocer la forma y posición al tacto es de gran ayuda.
All this is really fascinating but, if machines continue to evolve at this rate, by the end of this decade there will not be any of the jobs that today allow us to put something hot (and edible) in our mouth and worst of all, the jobs of the future are yet to be invented.
Todo esto es realmente fascinante pero, si las máquinas siguen evolucionando a este ritmo, a finales de esta década no existirá ninguno de los trabajos que hoy día nos permiten llevarnos algo caliente (y comestible) a la boca y lo peor de todo es que los empleos del futuro todavía estar por inventar.
More information/Más información
https://techxplore.com/news/2021-01-technique-robots-pose.html