| Español | English |
El motor asíncrono trifásico alimentado por un convertidor de frecuencia presenta dos modos de operación definidos, en función de si la velocidad de trabajo es mayor o menor que la velocidad nominal del motor.
Rango de flujo constante
En el rango de frecuencias en el que la velocidad es menor que la velocidad nominal del motor, el convertidor de frecuencia mantiene la razón tensión/frecuencia constante.
El flujo magnético en el motor permanece constante.
En este modo de operación el par máximo disponible es constante.
Este modo se conoce también como rango de par constante.
Rango de debilitamiento del campo
En el rango de frecuencias en el que la velocidad es mayor que la velocidad nominal del motor, el convertidor de frecuencia no puede aumentar la tensión de forma proporcional a la frecuencia, la tensión máxima del motor es un parámetro de diseño del mismo.
El flujo magnético en el motor disminuye, siendo inversamente proporcional a la frecuencia de operación.
En este modo de operación el par disminuye de forma proporcional al aumento de velocidad.
La potencia entregada por el motor es constante.
Este modo se conoce también como rango de potencia constante.
Capacidad de carga
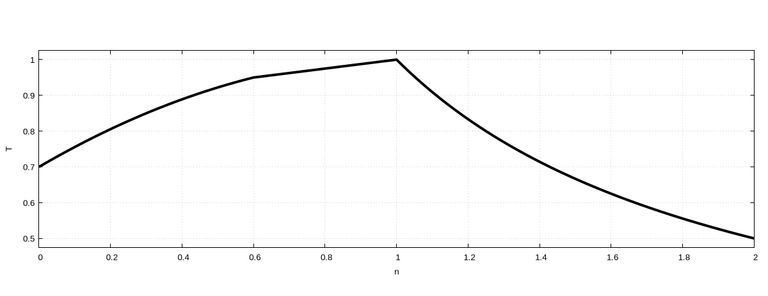
El par disponible en el motor esta limitado, han de tenerse en cuenta las restricciones tanto térmicas como del flujo magnético disponible.
En el caso del motor autoventilado, la capacidad de refrigeración del motor disminuye al hacerlo su velocidad de giro, de forma que en el rango de flujo constante es necesario disminuir de forma acorde el par disponible para evitar el sobrecalentamiento del motor, si el motor dispone de ventilación forzada no es necesario ajustar el par.
El rango de potencia constante provoca un aumento de las pérdidas en el motor debido a la frecuencia/velocidad de operación más elevada amén de que el par se encuentra limitado por el menor flujo magnético disponible.
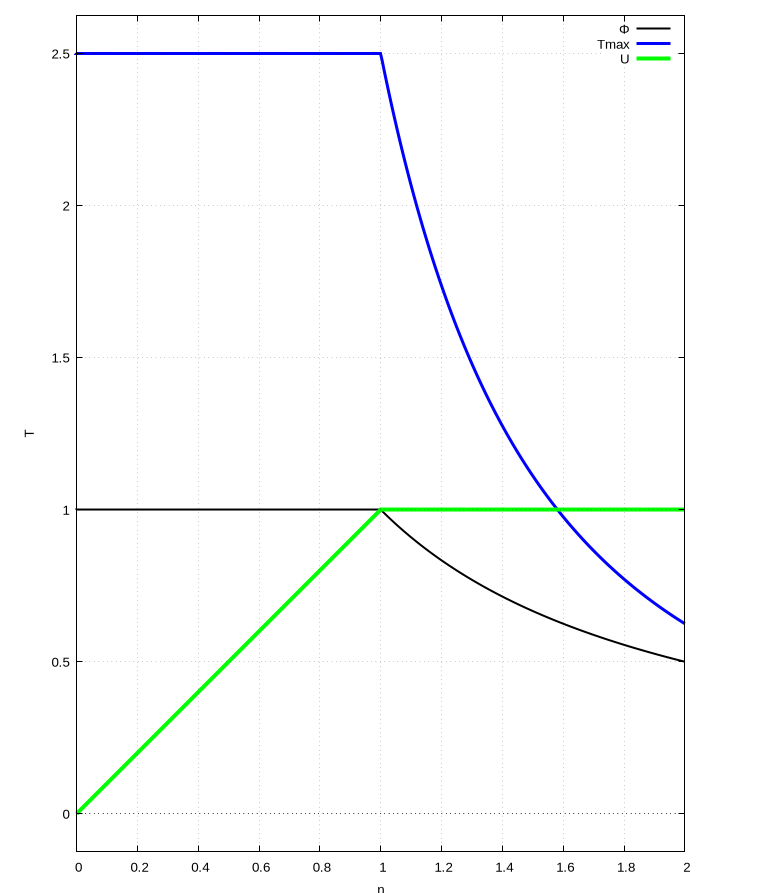
El siguiente gráfico muestra la capacidad de carga en función de la frecuencia; este gráfico es general, en el caso de un motor concreto es necesario consultar la documentación técnica del fabricante.
Fórmulas de utilidad
Par constante
Potencia constante
I = Inominal ∙ T / Tnominal , ( 0,8 ∙ Tnominal ≤ T ≤ 0,7 ∙ Tmax )
T = Tnominal ∙ fnominal / f
Tmax = Tmax. nominal ∙ ( fnominal / f )2
I = Inominal ∙ P / Pnominal , ( 0,8 ∙ Pnominal ≤ P ≤ 0,7 ∙ nnominal / n ∙ Pmax )
nominal hace referencia al punto nominal del motor.
max hace referencia al punto de par máximo del motor.
T, I, f, n, p; par, corriente, frecuencia, velocidad y potencia respectivamente.
Las fórmulas para la corriente son aproximaciones, válidas en las condiciones especificadas.
Al diseñar una motorización basada en un convertidor de frecuencia aplicado a un motor asíncrono es necesario evaluar los dos rangos de operación posibles.
En cada caso particular se pueden obtener aplicaciones con distintas características respecto a los criterios de diseño que pueden acercarnos a una mejor solución.
| English | Español |
When feeding an asynchronous motor by a variable frequency converter there are two avalaible operating modes, operating above or below the rated motor frequency.
Constant flux operation
When operating a motor below the rated speed the driver makes the motor's flux a constant.
In this mode the torque is a constant.
Field-Weakening operation
When operating a motor above the rated speed the motor's flux decreases as the voltage is no longer increased, however, the frequency is increased.
Field-Weakening operation is involved when a motor is operated above the rated motor frequency and the supply voltage remains the same.
Torque decreases because flux decreases, at constant power, the torque decreases inversely proportional to the speed.
Torque derating
Thermal considerations and flux avaliability limit the useable torque.
In self-ventilated motors, thermal capacity diminish as speed does, so at constant flux , torque ought to be derated in order to no overload the motor.
At constant power, higher speed rises the temperature of the motor and restrict the avalaible magnetic flux.
This chart shows the torque derating vs speed.
Above chart is broad, always consult the technical information of the manufacturer's motor
Some formulae
Constant Torque
Constant Power
I = Inominal ∙ T / Tnominal , ( 0,8 ∙ Tnominal ≤ T ≤ 0,7 ∙ Tmax )
T = Tnominal ∙ fnominal / f
Tmax = Tmax. nominal ∙ ( fnominal / f )2
I = Inominal ∙ P / Pnominal , ( 0,8 ∙ Pnominal ≤ P ≤ 0,7 ∙ nnominal / n ∙ Pmax )
nominal refers to nominal motor data.
max refers to maximum torque motor data.
T, I, f, n, p; torque, current, frequency, speed and power.
The motor current formulas are approximations on the intervals shown.
Designing a VFD application should explore the two avalaible operational modes so the design could end in a satisfactory solution.