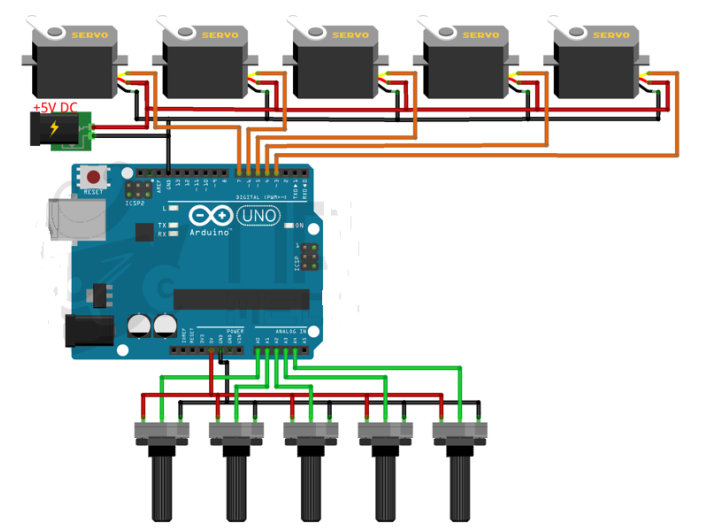
Circuito eléctrico del brazo
Electric circuit of the arm
Programacion // programming
#include <Servo.h>
Servo servo1; //creamos un objeto servo
Servo servo2; //creamos un objeto servo
Servo servo3; //creamos un objeto servo
Servo servo4; //creamos un objeto servo
Servo servo5; //creamos un objeto servo
void setup()
{
servo1.attach(3); // asignamos el pin al servo.
servo2.attach(4); // asignamos el pin al servo.
servo3.attach(5); // asignamos el pin al servo.
servo4.attach(6); // asignamos el pin al servo.
servo5.attach(7); // asignamos el pin al servo.
Serial.begin(9600);
}
void loop()
{
int angulo1 = map(analogRead(A0), 0, 1023, 0, 180);
int angulo2 = map(analogRead(A1), 0, 1023, 0, 180);
int angulo3 = map(analogRead(A2), 0, 1023, 0, 180);
int angulo4 = map(analogRead(A3), 0, 1023, 0, 180);
int angulo5 = map(analogRead(A4), 0, 1023, 0, 180);
servo1.write(angulo1); // enviamos el valor escalado al servo.
servo2.write(angulo2); // enviamos el valor escalado al servo.
servo3.write(angulo3); // enviamos el valor escalado al servo.
servo4.write(angulo4); // enviamos el valor escalado al servo.
servo5.write(angulo5); // enviamos el valor escalado al servo.
//----Enviamos los ángulos serialmente--------------
Serial.print("Angulos 1: ");
Serial.print(angulo1);
Serial.print(" 2: ");
Serial.print(angulo2);
Serial.print(" 3: ");
Serial.print(angulo3);
Serial.print(" 4: ");
Serial.print(angulo4);
Serial.print(" 5: ");
Serial.println(angulo5);
delay(10);
}
aquí les dejo algunas fotos del brazo robótico terminado. ¡Espero que les gusten tanto como a mí me gusta verlas! Y no se preocupen si tienen algún contratiempo intentando hacer funcionar el brazo.
Algunos tips que les dejo a continuación:
-Utilizar una fuente externa para alimentar los servomotores
-La programación que deje en este post depende mucho muchísimo de los servomotores y de los potenciómetros que utilicen en el armado.
-no olvidar de "unir" los negativos y GND para que todo funcione correctamente.
Here are a few photos of the completed robotic arm. I hope you like them as much as I do! And don't worry if you encounter any hiccups while trying to get the arm to work. Here are some tips for you:
-Use an external power source to power the servo motors.
-The programming provided in this post relies heavily very heavily on the servo motors and potentiometers you use in assembly.
-Don't forget to "connect" the negatives and GND to ensure everything functions correctly.



Bueno compañeros espero que hayan disfrutado tanto como yo del brazo robótico controlado por potenciómetros. Pero eso no es todo: ¿sabían que también pueden ajustar la programación para prescindir de los potenciómetros? Esto les permitirá lograr movimientos repetitivos con una precisión asombrosa en el agarre de objetos. ¡Qué emocionante seguir explorando las posibilidades de este proyecto!
Si quieren más detalles y actualizaciones me lo pueden dejar en los comentarios.
Un saludo compañeros!
Alright folks, I hope you've enjoyed the robotic arm controlled by potentiometers as much as I have. But wait, there's more! Did you know that you can also adjust the programming to do away with the potentiometers? This will allow you to achieve repetitive movements with astonishing precision in grasping objects. How thrilling it is to continue exploring the possibilities of this project! If you want more details and updates, feel free to leave me a comment. Cheers, everyone!
Excelente amigo, siempre me ha gustado la robótica, Lamentable acá se dificulta acceder a los materiales que muestras y la mayoría del tiempo hay que reciclar para obtener piezas, pues importar insumos suele ser un poco caro. También me facina el trabajo con Arduino, me ha gustado el trabajo que muestras, auque no he profundizado en la programación pues aún no cuento con alguno, pero aprender y experimentar con ellos es un objetivo en mente. Saludos
gracias por tu comentario compañero! yo vivo en argentina y por ahora se pueden conseguir estos materiales, lo bueno de Arduino es que tiene una comunidad muy grande de habla hispana , que resuelven muchas dudas , muchos tutoriales y además de eso la curva de aprendizaje es bastante rápida , ojala puedas experimentar en algun momento! Un saludo compañero
Congratulations @tecnotronics! You have completed the following achievement on the Hive blockchain And have been rewarded with New badge(s)
Your next target is to reach 400 upvotes.
Your next payout target is 100 HP.
The unit is Hive Power equivalent because post and comment rewards can be split into HP and HBD
Your next target is to reach 400 upvotes.
You can view your badges on your board and compare yourself to others in the Ranking
If you no longer want to receive notifications, reply to this comment with the word
STOPCheck out our last posts: