If you are interested in robotics, you certainly hear the robots following the line. As you can do your own design, you can find dozens of projects on the internet. Unfortunately, this robot does not guarantee to be the first in the competition, but it is a great choice for entertainment.
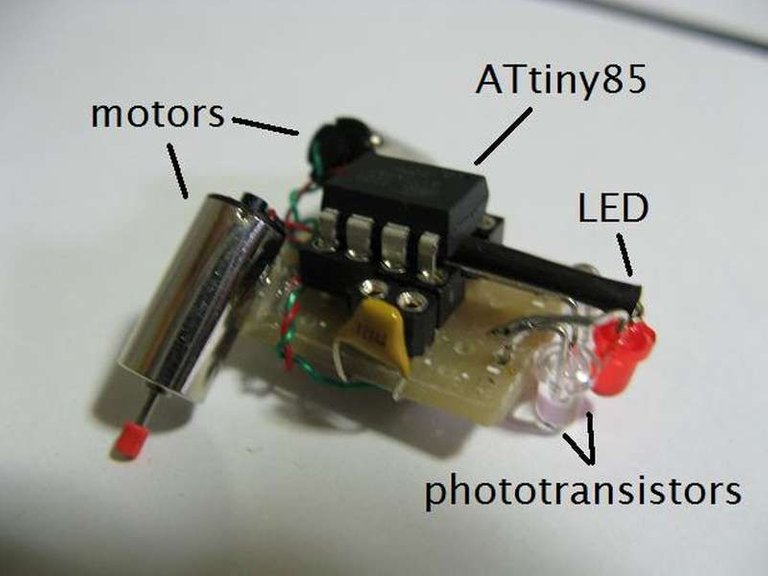
This robot can be the smallest line follower you can see. It's quite easy to do, but you have to be careful. This robot follows the black line on the white background.
The cost is about 10 US$
Components:
Circuit Diagram:
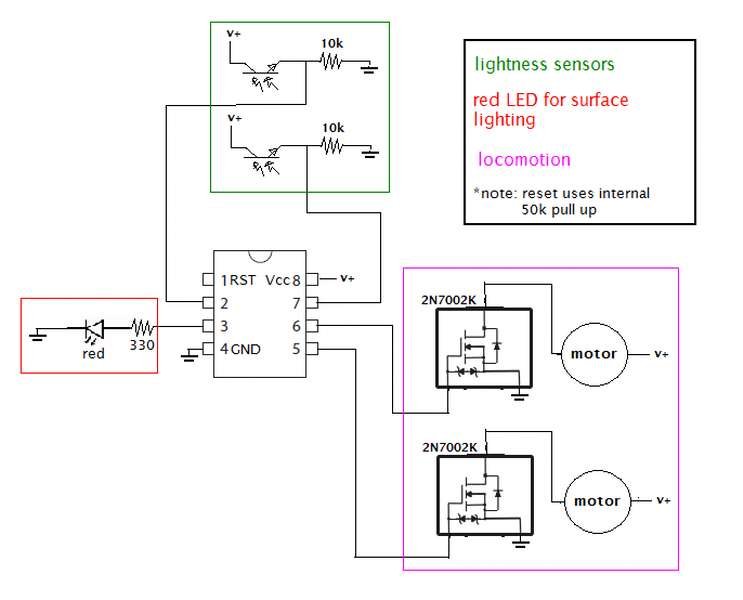
The circuit diagram is quite simple. The area with the red LED is the transmitter sensor. The green framed area is the receiving part. In the purple frame we have our motor drivers and motors.
At the same time, you need to connect the part that writes V +, the positive pole of the battery and the part that writes the ground to the negative pole of the battery. If you want, you can add a small switch to the circuit.
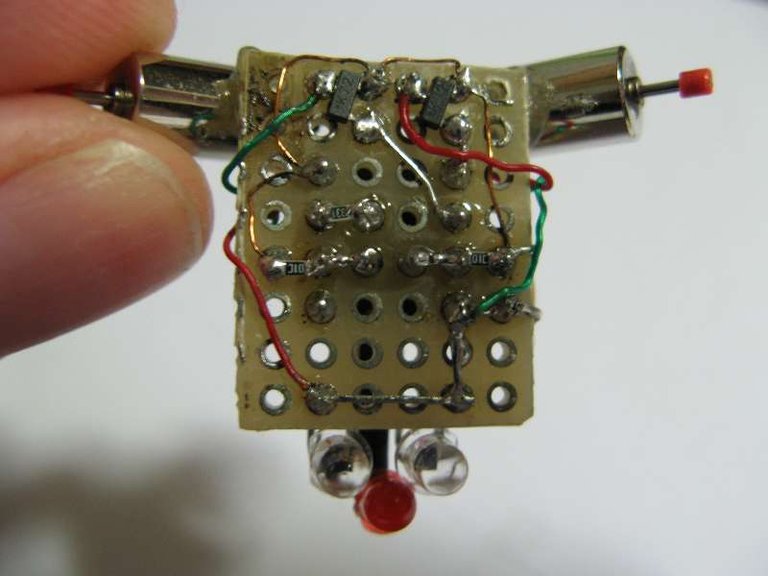
Here is the completed state of the robot:

Finally, the robot codes:
/*
Robot version 2
Simpler. ATtiny85, 2 motors, LED, two sensors
Sensor stuff:
both white : no prior : random walk
: prior : turn in direction of last black
one white : ideal situation, move straight
both black : no prior : random walk
: prior : turn in direction of last white
Sorry if that was hard to understand
*/
// the pin definitions
// numbers for random walk and memory
uint8_t lspd, rspd;
uint16_t lsenseval, rsenseval, lwhiteval, rwhiteval;
// functions
void testSensors();
void followEdge();
void moveTime(uint8_t lspeed, uint8_t rspeed, uint16_t time);
void move(uint8_t lspeed, uint8_t rspeed);
void stop();
void senseInit();
void flashLED(uint8_t flashes);
// just for convenience and simplicity (HIGH is off)
void setup(){
pinMode(lmotorpin, OUTPUT);
pinMode(rmotorpin, OUTPUT);
pinMode(2, INPUT);
pinMode(3, INPUT);
ledoff;
pinMode(ledpin, OUTPUT);
analogWrite(lmotorpin, 0);
analogWrite(rmotorpin, 0);
lspd = 17;
rspd = 17;
// give a 6 second pause to set the thing on a white surface
lsenseval = 6;
while(lsenseval){
lsenseval--;
flashLED(1);
delay(989);
}
flashLED(4);
delay(500);
senseInit();
}
void loop(){
followEdge();
}
void followEdge(){
// now look for edge
uint8_t lastMove = 1; //0=straight, 1=left, 2=right
unsigned long moveEndTime = 0; // the millis at which to stop
unsigned long randomBits = micros();
unsigned long prior = 0; // after edge encounter set to millis + memtime
uint8_t priorDir = 0; //0=left, 1=right, 2=both
uint8_t lastSense = 1; //0=edge, 1=both white, 2=both black
uint8_t i = 0; // iterator
while(true){
// only update about once every 20ms
delay(18);
// read the value 4 times and average
ledon;
delay(2);
lsenseval = 0;
rsenseval = 0;
for(i=0; i<4; i++){
lsenseval += analogRead(lsensepin);
rsenseval += analogRead(rsensepin);
}
// don't divide by 4 because it is used below
ledoff;
if(randomBits == 0){ randomBits = micros(); }
if((lsenseval > lwhiteval3) && (rsenseval > rwhiteval3)){
// both white - if prior turn to black, else random walk
if(lastSense == 2 || millis() < prior){
// turn toward last black or left
if(priorDir == 0){
moveEndTime = millis()+smallturn;
move(0, rspd); // turn left
lastMove = 1;
}else if(priorDir == 1){
moveEndTime = millis()+smallturn;
move(lspd, 0); // turn right
lastMove = 2;
}else{
moveEndTime = millis()+bigturn;
move(0, rspd); // turn left a lot
lastMove = 1;
}
}else{
// random walk
if(millis() < moveEndTime){
// just continue moving
}else{
if(lastMove){
moveEndTime = millis()+steplength;
move(lspd, rspd); // go straight
lastMove = 0;
}else{
if(randomBits & 1){
moveEndTime = millis()+smallturn;
move(0, rspd); // turn left
lastMove = 1;
}else{
moveEndTime = millis()+smallturn;
move(lspd, 0); // turn right
lastMove = 2;
}
randomBits >>= 1;
}
}
}
lastSense = 1;
}else if((lsenseval > lwhiteval3) || (rsenseval > rwhiteval3)){
// one white - this is the edge
// just go straight
moveEndTime = millis()+steplength;
move(lspd, rspd); // go straight
lastMove = 0;
lastSense = 0;
prior = millis()+memtime;
if(lsenseval > lwhiteval*3){
// the right one is black
priorDir = 1;
}else{
// the left one is black
priorDir = 0;
}
}else{
// both black - if prior turn to white, else random walk
if(lastSense == 1 || millis() < prior){
// turn toward last white or left
if(priorDir == 0){
moveEndTime = millis()+smallturn;
move(lspd, 0); // turn right
lastMove = 2;
}else if(priorDir == 1){
moveEndTime = millis()+smallturn;
move(0, rspd); // turn left
lastMove = 1;
}else{
moveEndTime = millis()+bigturn;
move(lspd, 0); // turn right a lot
lastMove = 2;
}
}else{
// random walk
if(millis() < moveEndTime){
// just continue moving
}else{
if(lastMove){
moveEndTime = millis()+steplength;
move(lspd, rspd); // go straight
lastMove = 0;
}else{
if(randomBits & 1){
moveEndTime = millis()+smallturn;
move(0, rspd); // turn left
lastMove = 1;
}else{
moveEndTime = millis()+smallturn;
move(lspd, 0); // turn right
lastMove = 2;
}
randomBits >>= 1;
}
}
}
lastSense = 2;
}
}
}
void moveTime(uint8_t lspeed, uint8_t rspeed, uint16_t time){
analogWrite(lmotorpin, lspeed);
analogWrite(rmotorpin, rspeed);
delay(time);
analogWrite(lmotorpin, 0);
analogWrite(rmotorpin, 0);
}
void move(uint8_t lspeed, uint8_t rspeed){
analogWrite(lmotorpin, lspeed);
analogWrite(rmotorpin, rspeed);
}
void stop(){
analogWrite(lmotorpin, 0);
analogWrite(rmotorpin, 0);
}
// stores the average of 16 readings as a white value
void senseInit(){
lwhiteval = 0;
rwhiteval = 0;
ledon;
delay(2);
for(uint8_t i=0; i<16; i++){
lwhiteval += analogRead(lsensepin);
delay(1);
rwhiteval += analogRead(rsensepin);
delay(9);
}
lwhiteval >>= 4;
rwhiteval >>= 4;
ledoff;
}
void flashLED(uint8_t flashes){
while(flashes){
flashes--;
ledon;
delay(200);
ledoff;
if(flashes){ delay(500); }
}
}
Very nice that educational people like you are among us
Thanks :) @tulpar