Modelado y Simulación de Sistemas Físicos.- Introducción
Modelos matemáticos
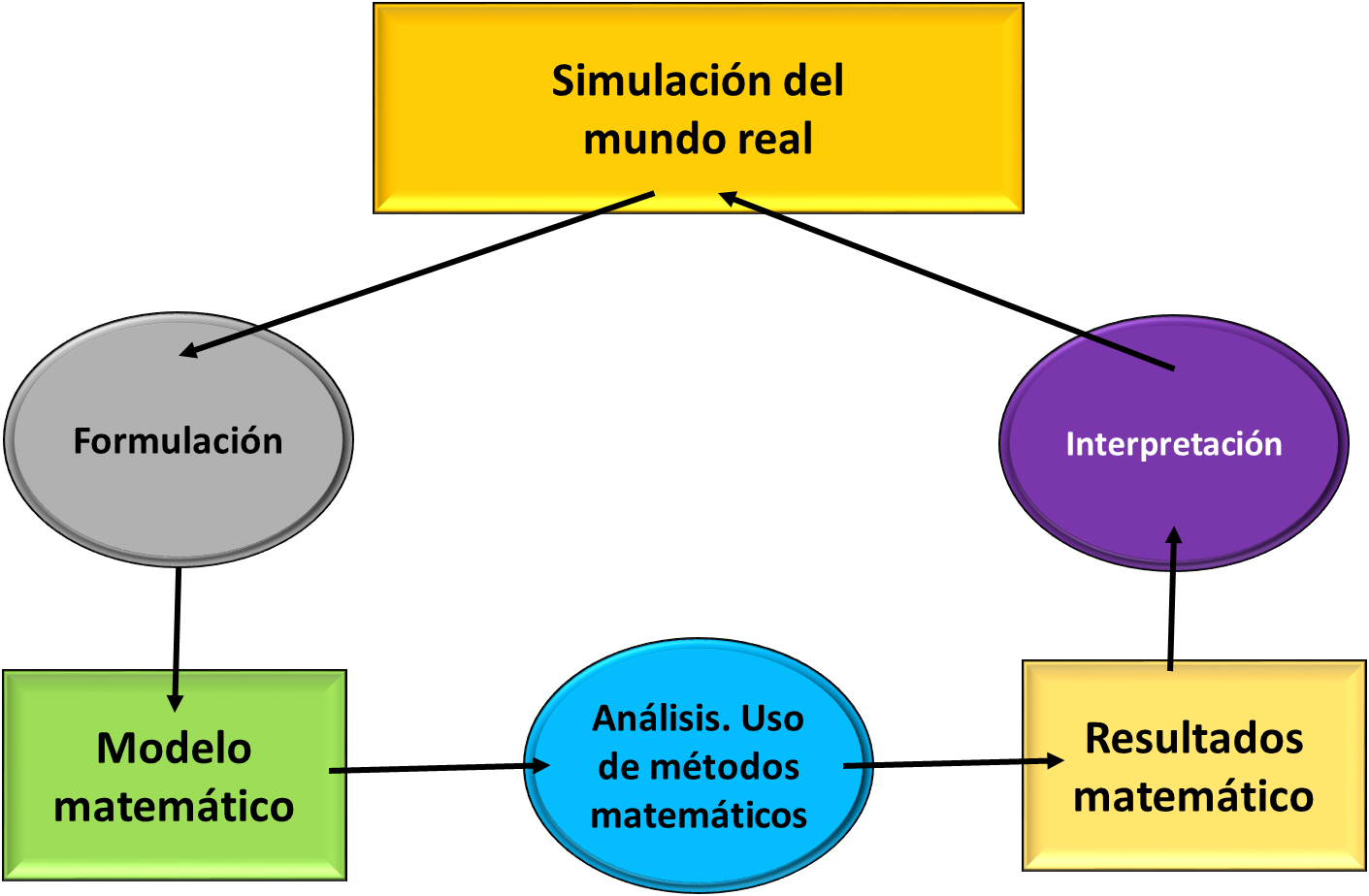
La modelación matemática incluye necesariamente lo siguiente:
- Tomar un problema del mundo real y formularlo en términos matemáticos, es decir, por medio de expresiones algebraicas construimos un modelo matemático cuyo comportamiento se aproxima al problema que queremos abordar, entender y hasta predecir.
- Una vez que hemos establecido nuestro modelo, debemos analizarlo y solucionarlo por medio de métodos matemáticos, ya sean analíticos o numéricos.
- Obtenidos los resultados debemos interpretarlos y así dar respuestas a las preguntas planteadas al problema original.
Cuando tratamos de desarrollar un modelo matemático, este puede tomar muchas formas, éstas están vinculadas con el sistema que queremos modular, de tal manera que hay modelos que serán más convenientes que otros. Un ejemplo son los problemas de optimización de control, o control óptimo, en estos casos es muy útil usar representaciones en espacios de estados.
Por el contrario, para analizar respuestas transitorias o de respuestas en frecuencia de sistemas lineales, con una entrada y salida que no dependen del tiempo, la representación más correcta es por medio de funciones de transferencia.
Una vez que hemos construido un modelo matemático que represente un sistema físico, procedemos a usar los métodos analíticos, numéricos o computacionales para estudiarlo y sintetizarlo.
Sistema físico
Vamos a definir un sistema físico como un conjunto de variables 𝑥, 𝑦, 𝑧, 𝑤, ⋯, que interactúan entre sí para dar un resultado o salida que es característico de dicho sistema. Los sistemas pueden tener una entrada que da inicio a una serie de interrelaciones de las variables de dicho sistema.
Señales
Las señales son entidades físicas que contienen patrones de información representados gráficamente por una forma determinada, por ejemplo, el proceso de crear la voz en el ser humano se produce por las fluctuaciones en la presión acústica.La siguiente animación muestra el registro de una señal de voz obtenida por un micrófono de la palabra shoud (debería), acá se detectan las perturbaciones acústicas que se convierten en una señal eléctrica.
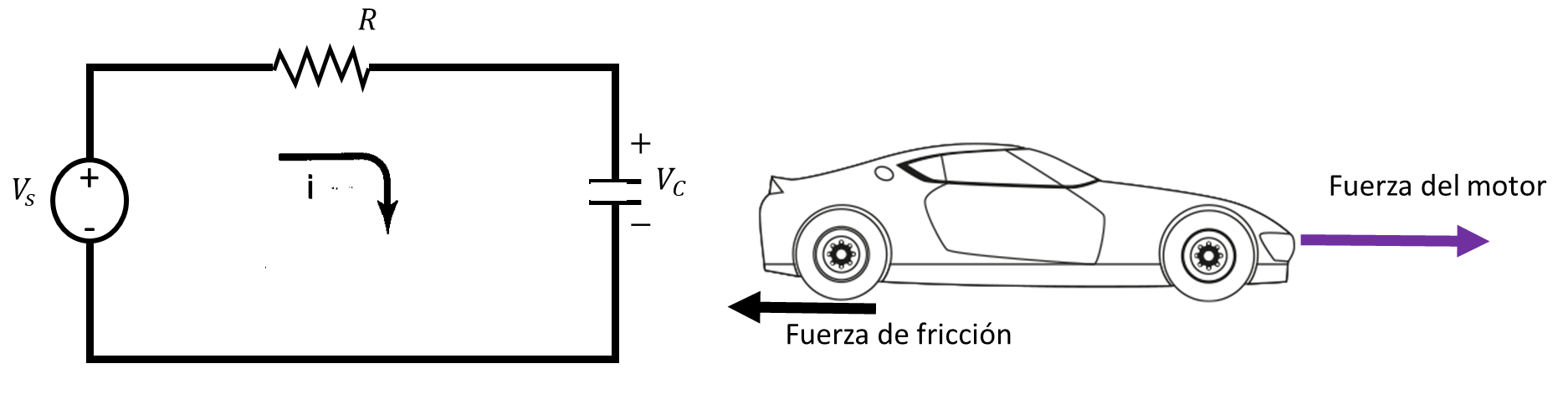
Otros ejemplos de señales podrían ser las variaciones en el tiempo de los voltajes de la fuente y del capacitor, así como los cambios en el tiempo de una fuerza aplicada y la velocidad resultante de un automóvil (figura1).
Sistema de control automático
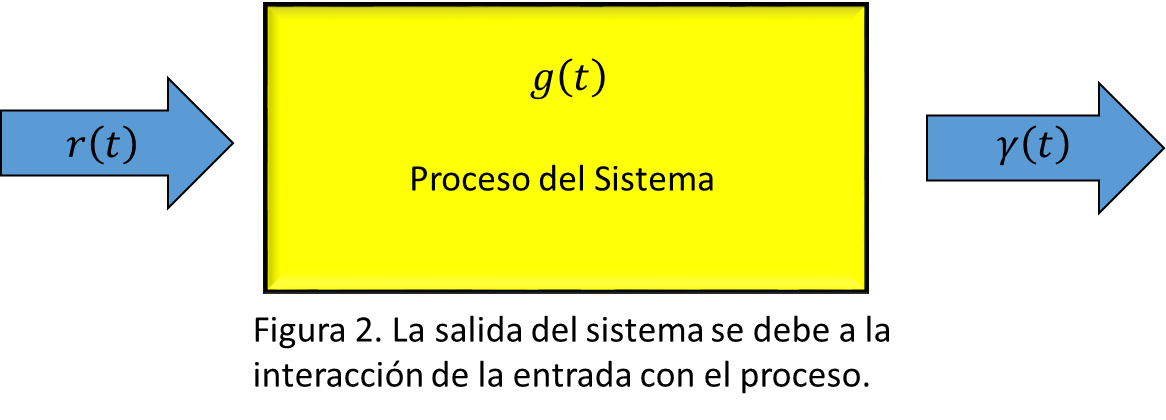
Un sistema de control automático es aquel cuyas variables que lo componen son capaces de controlarse a sí mismas. Vamos a representar la entrada del sistema como r(t), el proceso de interacción de las variables del sistema lo denotaremos como g(t) y la salida como 
La relación entre la entrada y salida con el sistema es causal (causa y efecto), entonces el proceso por controlar —también se denomina planta—, relaciona la salida con la entrada.
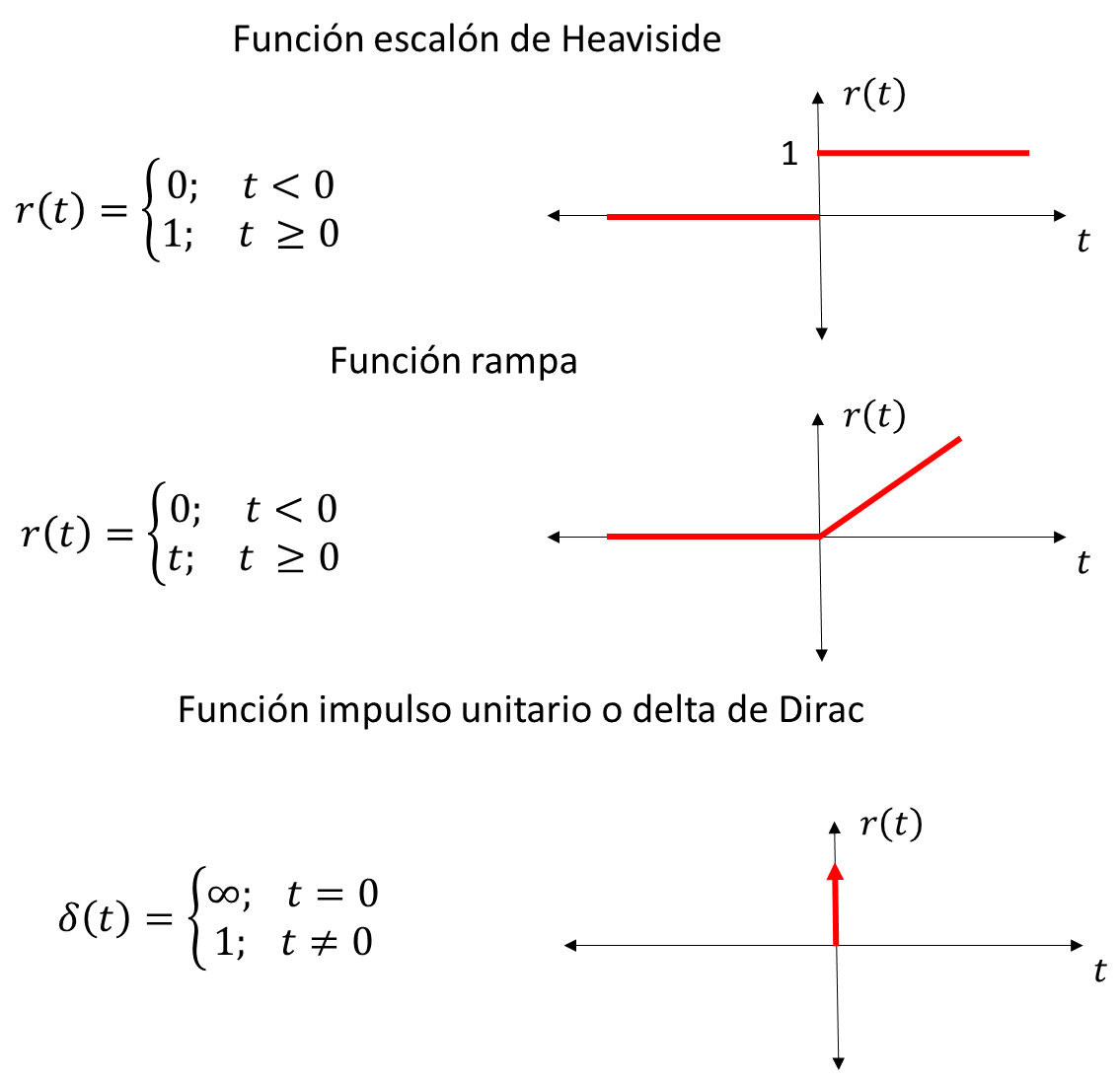
La función escalón indica que al sistema ha entrado un comportamiento constante en el tiempo. La función rampa indica que al sistema se ha introducido un comportamiento variable temporal. La función impulso se caracteriza por ser una señal de entrada que en un tiempo muy corto tiene una gran magnitud.
Sistemas lineales
Un sistema se denomina lineal si se aplica el principio de superposición, es decir, la señal de respuesta producida por dos entradas distintas es la suma de las señales de respuestas individuales. De tal manera que un sistema lineal, la respuesta a varias entradas se calcula abordando una entrada a la vez y sumando los resultados.
Sistemas no lineales
Un sistema es no lineal si no se aplica el principio de superposición, es decir, la respuesta a dos señales de entrada no puede obtenerse tratándolas cada una a la vez y sumando los resultados.
Función de transferencia
La función de transferencia de un sistema físico que hemos descrito por medio de una ecuación diferencial lineal e independiente del tiempo, se define como el cociente entre la transformada de Laplace de la salida (función de respuesta) y la transformada de Laplace de la entrada (función de excitación) bajo la suposición de que todas las condiciones iniciales son cero.Sea la siguiente ecuación diferencial un sistema lineal independiente del tiempo:

En donde y es la salida del sistema y x es la entrada. La función de transferencia de este sistema se obtiene aplicando la transformada de Laplace a ambos miembros de la ecuación (1) tomando la suposición antes señalada de que todas las condiciones iniciales son nulas.

Por medio de esta definición de la función de transferencia podemos representar la dinámica de un sistema mediante ecuaciones algebraicas cuya variable es s.
Con esto terminamos esta parte introductoria del modelado y simulación de sistemas físicos, en el próximo post daremos más detalles de la función de transferencia aplicada a sistemas mecánicos.
Fuentes bibliográficas
- Dorf R., Boshop R. Sistemas de control moderno. 10ma. Ed. Prentice-Hall, Madrid, 2005.
- Hernández G. Introducción a los sistemas de control. Conceptos y aplicaciones con MATLAB. Perason, 2010.
- Ogata K. Ingeniería de control moderno. 3era. Ed. Person, México, 2010.
- Ogata K. Dinámica de sistemas. Prentice-Hall, México, 1987.
- Kuo B. Sistemas automáticos. 7ma. Ed. Prentice-Hall, México, 1996.
- Boyce W., DiPrima R.C. Ecuaciones diferenciales y problemas con valores en la frontera. 3era. Ed. Limusa, 1992.
- Edward C.H., Penney D. Ecuaciones diferenciales. 2da. Ed. Prentice-Hall, México, 2001.
- Oppenheim A., Willsky A., Señales y sistemas. Prentice-Hall, México, 1994.
- Reinoso O. Control de sistemas discretos. McGraw-Hill, Serie Schaum, Madrid, 2010.
Fuentes de las imágenes
- Imagen del auto Fuente.
Todas las demás imágenes fueron hechas por mi usando el software PowerPoint (PPT)


Son muchos los problemas en el orden de la física y muchos aspectos de la vida real que resuelven los modelos matemáticos, saludos amigo y gracias por compartir tan valioso aporte.
Thanks for your contribution to the STEMsocial community. Feel free to join us on discord to get to know the rest of us!
Please consider delegating to the @stemsocial account (85% of the curation rewards are returned).
You may also include @stemsocial as a beneficiary of the rewards of this post to get a stronger support.