This type of suspension is called rocker-bogie and it allows the rovers to overcome larger obstacles with better tilt stability.

The rocker-bogie setup requires six wheels and has 3 important parts that allow it to function exceptionally well for the needs of a robotic mission on Mars - a differential, two rockers on each side and two bogies attached to the rear part of each rocker.
As you can see, this design doesn't employ springs or axles connecting multiple wheels which makes it very different from what we have in our cars. But the Mars rovers are made for much rockier terrain and are also made to drive at much slower speeds (slower than an actual pedestrian looking at their phone).
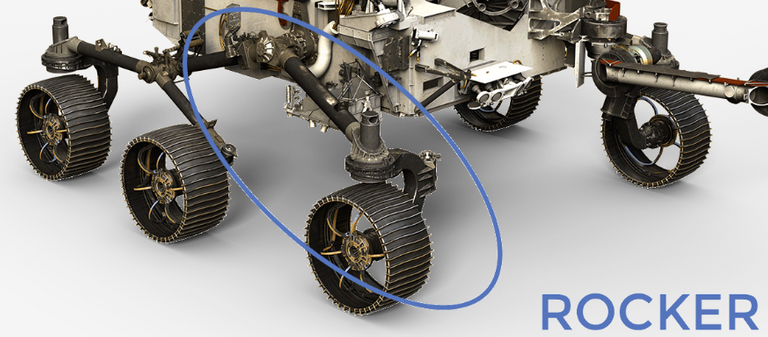
The larger links on each side of the rover that connect the front wheel with the rear two and allows the front wheel to "rock" in comparison to the other two. The rockers on each side are connected with a differential that keeps the chassis at the average pitch of the two rockers allowing it more stability when there are different obstacles and denivelations on each side.
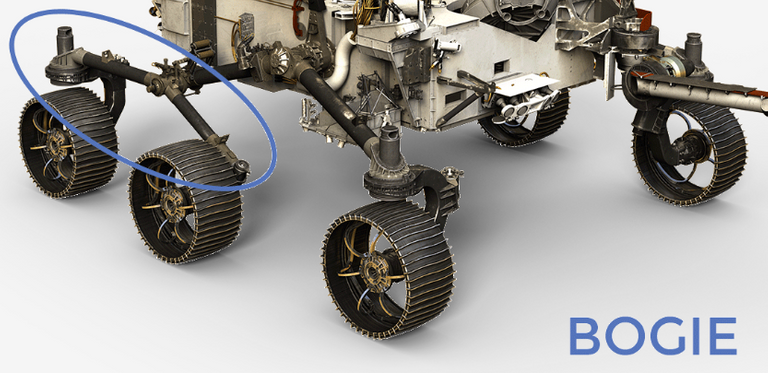
While the front side of the rocker is fitted with a wheel, the back side is fitted with a setup of two connected wheels called a bogie. They also have the ability to rock relative to each other. This setup allows the rovers to keep all of their six wheels on the ground at all times while staying stable. The system could overcome obstacles that are larger than twice the diameter of each wheel and the lack of springs in this suspension makes it less likely for the rovers to tip over due to additional tilt caused by the loaded side sinking additionally due to spring compression.
The rocker-bogie suspension in action

While this animation shows us the rocker and bogie in action it is unfortunately not a correct representation of the way the suspension works because it doesn't display the pitch angle of the chassis correctly. Instead of staying level the chassis (illustrated in blue) should pitch to the average pitch of both rockers. The suspension averages out pitch but does not eliminate it.
But the animation is still useful in seeing the effectiveness of the suspension in overcoming obstacles that are different for both sides and that are much larger than the wheel diameters.

So this is basically why NASA are currently favoring this type of suspension for all of their rovers - it was used in their past Mars missions and it is going to be used in their next Mars 2020 which is going to be their most capable rover to date.
All images courtesy of NASA and their public domain image policy except the animation which is CC BY-SA 3.0.

you explained it well, thanks for the good post ;)
Thank you! And thanks for stopping by to read!
your all post improve my knowledge thanks sir
I'm very happy to hear that! Thanks for stopping by and taking the time to drop me a line.
wellcome