Este 27 de noviembre de 2018 la sonda espacial InSight aterrizó con éxito, tras hacer frente a los llamados “siete minutos de terror“, en la superficie de Marte.

RESUMEN
El objetivo fundamental de este Trabajo Especial de Grado es diseñar y construir un prototipo de brazo robótico con cinco grados de libertad, con la finalidad de ser utilizado en laboratorios, industrias ó en ambientes de riesgo para la salud humana, la toxicidad es uno de los factores que determinan el riesgo, pero éste responde además a otros varios factores, como la intensidad y la duración de la exposición, la volatilidad del compuesto y el tamaño de las partículas. Adicionalmente se contará con el microcontrolador 16F877A que se adecua según las demandas del proyecto, el cual se encarga de direccionar y recibir el código fuente, su decodificación y la ejecución de la operación que implica la instrucción, es decir ejecutar el movimiento de los motores. Para este proyecto se optó por el uso de servomotores, ya que el sistema requiere de un posicionamiento mecánico preciso y controlado, su punto de referencia o setpoint se indica mediante una señal de control. El operador podrá poner en marcha el brazo robótico manipulando un control o joystick que a su vez mandará toda la información necesaria al PIC, para que este ejecute el movimiento requerido, aunado a esto el brazo cuenta con unas pinzas con la cuales se facilita el poder tomar y trasladar objetos.
Descriptores: Brazo Robótico, Microcontroladores, Robot Industrial, Servomotor.
¿Que es un VENBR5?
Este manipulador o brazo mecánico es una la unidad mecánica que se desplaza y ejecuta movimientos parecidos a los de un brazo humano. Está provisto de varias articulaciones que le ofrecen diferentes alternativas de movilidad, para que el extremo final o “muñeca” del brazo pueda llegar a un punto en un espacio definido en coordenadas específicas.
¿Cómo se Energiza el Sistema de VENBER5?
Conectar a un toma 110v la fuente del PIC (el cargador de celular), y la fuente de los servomotores (convertidor). Previamente verificar que el voltaje en el convertidor sea de 5v.¿Cómo logramos darle movimientos a las articulaciones del VENBR5?
A través del Joystick o control de mando se podrá realizar los movimientos en un angulo máximo de 180°de: mano, codo y hombro. Igualmente se podrá controlar la apertura y cierre de la pinza y si en algún momento se necesita reiniciar el sistema se tiene un pulsador para tal fin, tal y como se muestra en la figura 30.¿Cómo se apaga el sistema?
El brazo se apaga inmediatamente cuando se le corta el suministro de energía.
Les muestro fotografías de la construcción del brazo mecánico.

MDF

MESA DE TRABAJO
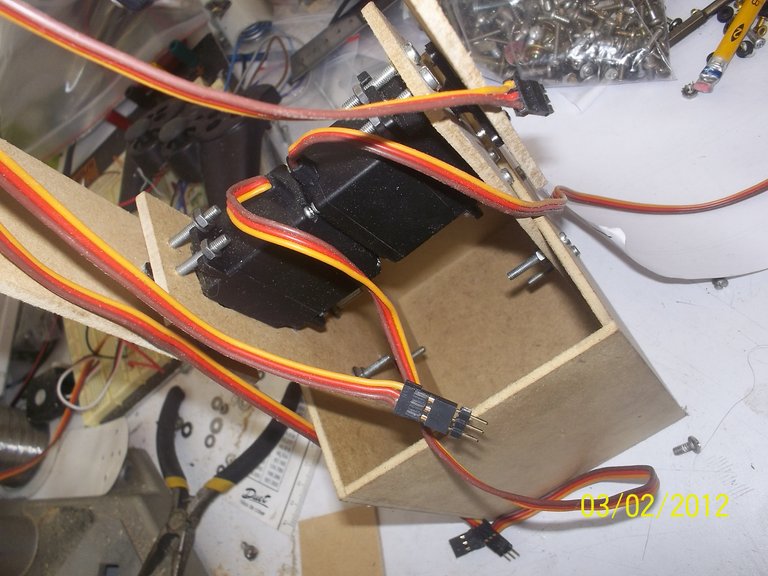

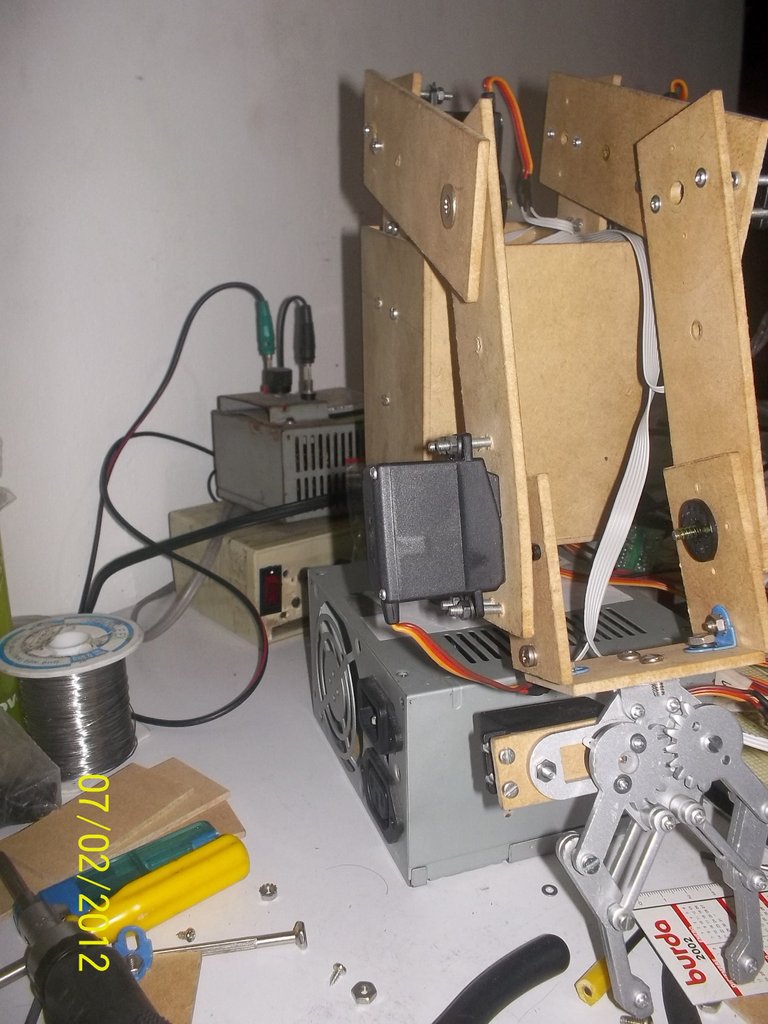
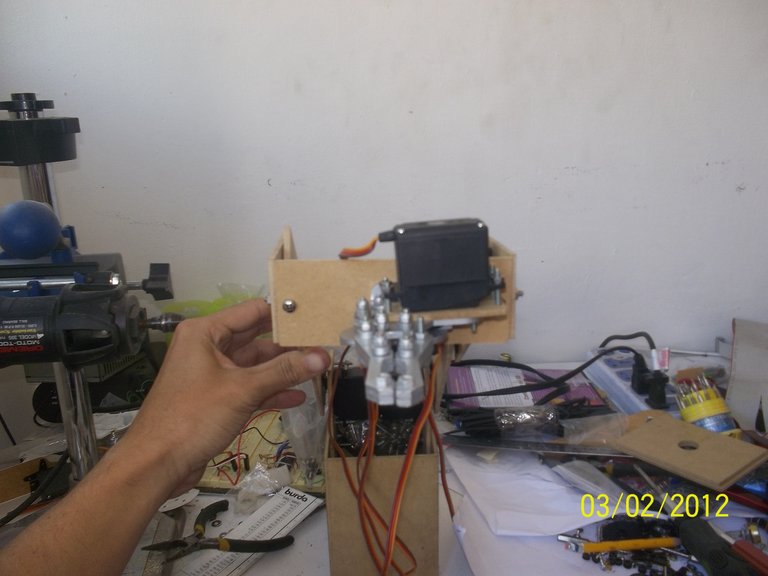
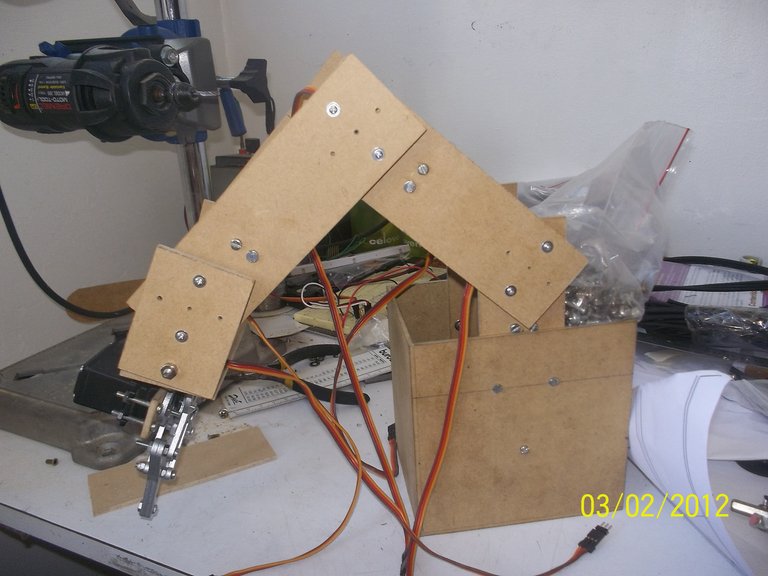

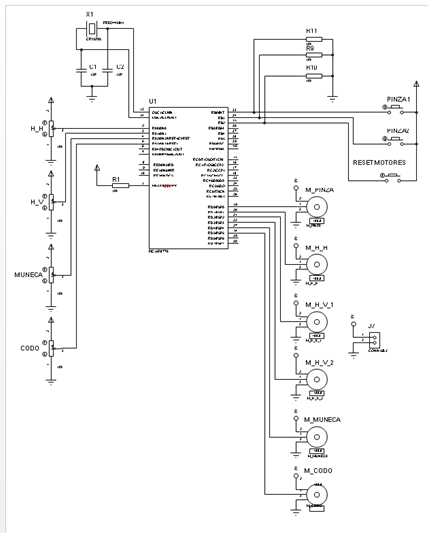
DIAGRAMA ELECTRICO
Para cualquier modificación o programación del pic consultar con el diseñador. J. Cristal P. Conopoy
Trabajo Especial de Grado presentado como requisito parcial para optar al Título de Ingeniero en Electrónica

Esta muy bueno este articulo, te felicito.
Felicidades al talento venezolano, nos enorgullece ver la excelencia de nuestra gente!!. Gracias por compartirlo.