Saludos y bienvenidos, en esta continuación de la publicación anterior referente al análisis de estabilidad de sistemas materiales, abordaremos el estudio de casos más complejos, encontraremos un caso de vinculación aparente distinto al caso estudiado en la Parte I de esta publicación, y veremos como la teoría nos ayuda a simplificar el análisis de estabilidad, teniendo como objetivo identificar si el sistema material estudiado es estable o no (”se mueve” o ”no se mueve”).
Todas las publicaciones sobre Estática Aplicada se han recopilado en el siguiente enlace:
•Material de Estática Aplicada
Para el estudiante de Ingeniería Civil es importante aprender a reconocer la estabilidad o inestabilidad de un sistema material y de qué formas se pueden dar. Si bien se comparten algunos aspectos en común con la Mecánica Aplicada, donde se analiza el movimiento de cuerpos rígidos alrededor de centros instantáneos de rotación, en Estática Aplicada estos movimientos se suponen de orden infinitesimal, y la meta no es calcular velocidades y/o aceleraciones, sino identificar el comportamiento inestable de un sistema.
Por ello se busca con esta publicación aportar contenido didáctico referente a la Estática Aplicada, siendo esta rama de la física indispensable para muchas aplicaciones de la Ingeniería Civil.
Introducción
Para ejecutar el análisis de estabilidad de un sistema material, disponemos de herramientas y teoría vistas en la anterior publicación. Mediante la Ecuación (3) del artículo Determinación Algebraica de los Grados de Libertad de Sistemas Materiales en Estática Aplicada y Ejemplo de Aplicación podemos determinar los grados de libertad de un sistema material:

Donde “n” representa el número de chapas, “Vext” y “Vint” la cantidad de unidades de vinculación externas e internas respectivamente. Pero el número obtenido mediante la ecuación (1) debe ser verificado mediante un análisis geométrico de posibles polos en el sistema, ya que esta ecuación no advierte sobre la existencia de vínculos aparentes que no introducen restricción alguna.
Posteriormente se hallan los polos absolutos y relativos que tendría el sistema de acuerdo a la vinculación existente, y verificar si alguna chapa del sistema es de por sí estable al presentar más de una posibilidad para la ubicación de su polo absoluto. Luego, se aplica el Teorema de Kennedy (más exactamente el primer teorema de los polos o “1mer TDP”) para establecer una posible ubicación de los polos absolutos y relativos que aún no se han hallado:
De verificar que se cumple el 1mer TDP (primer teorema de los polos) en la totalidad o parte del sistema, se confirma entonces la existencia de alguna cadena cinemática de 1 grado de libertad, lo cual implica que existe inestabilidad en el sistema analizado. Esto es, cuando se verifica que no existe alguna otra solución para el polo absoluto o relativo además de la dada por el 1mer TDP.
Tal como se mencionó en la Parte I de la presente publicación, se pueden presentar tres situaciones luego de aplicar el 1mer TDP:
Puesto que pueden presentarse una infinidad de sistemas materiales con diferentes configuraciones geométricas en conjunto con diferentes tipos de vinculaciones tanto externas (a tierra) como internas (entre chapas), se proceden a estudiar distintos casos de sistemas materiales distintos al abordado en la Parte I de esta publicación. Esta infinidad de posibilidades para la imagen del sistema material abre paso a diferentes resultados en el análisis de estabilidad que valen la pena abordar.
Ejemplos de Análisis de Estabilidad de Sistemas Materiales
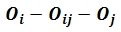
Ejemplo N°1: estudiar la estabilidad del siguiente sistema material. De existir algún vínculo aparente, indicar su ubicación.
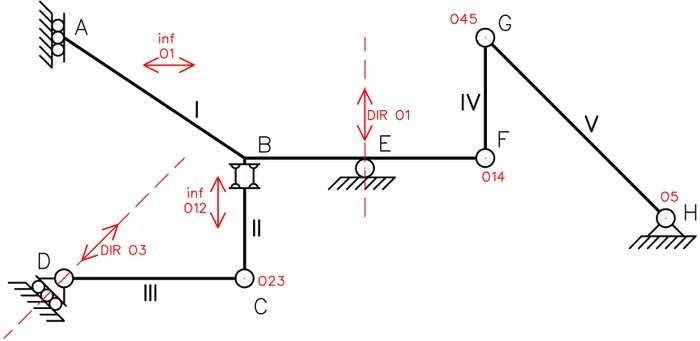
Observamos en la Fig. N°1 un sistema cuya imagen muestra una configuración que supera en complejidad a la mostrada en el ejemplo de la anterior publicación.
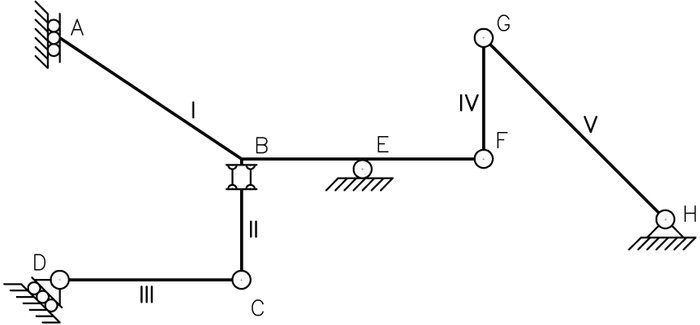
Grados de libertad según la Ec (1).
Al aplicar la ecuación (1):
Observamos la presencia únicamente de vínculos de segunda especie, a excepción de los apoyos simples en D y en E que aportan 1 unidad de vinculación.
Este resultado debe ser verificado mediante un análisis de la estabilidad del sistema tomando en cuenta su geometría y la disposición de los vínculos.
Polos según restricciones existentes
Ahora se procede a realizar un análisis de los posibles movimientos de las chapas de acuerdo a las vinculaciones existentes. Para ello, se señala para cada vínculo las posibilidades de ubicación de los polos absolutos y relativos entre cada una de las chapas de acuerdo a las restricciones que estos aportan:
El empotramiento móvil en A indica que la chapa I solo podría trasladarse verticalmente sin posibilidad de presentar rotación, por lo que todos los puntos de esta chapa tendrían su polo o centro de rotación en el infinito. De esta forma este vínculo aporta un polo en el infinito para esta chapa.
El apoyo simple en E indica que ese punto perteneciente a la chapa I no puede desplazarse verticalmente, por lo que indica que el polo absoluto de la chapa I estaría en alguna ubicación vertical a ese punto.
El otro apoyo simple en D indica la dirección de la ubicación del polo absoluto de la chapa III, pero no su ubicación exacta.
La articulación a tierra en H indica directamente la ubicación del polo absoluto de la chapa V.
Las rótulas indican directamente la ubicación del polo relativo entra chapas, como es el caso de las localizadas en C, F y G. Lo mismo ocurre con las bielas paralelas en B, solo que sucede algo relativamente similar al empotramiento móvil, el polo relativo está en el infinito, indicando que no existe rotación relativa de la chapa I respecto a chapa II, pero si podría presentarse un desplazamiento relativo entre ellas en dirección horizontal.
Todo esto nos conduce a la Fig. N°3:
Observamos que aún no hemos hallado algún polo absoluto para las chapas II, III y IV. Antes de aplicar el Teorema de Kennedy (o teoremas de los polos), podemos sacar ciertas conclusiones de lo hallado hasta ahora:
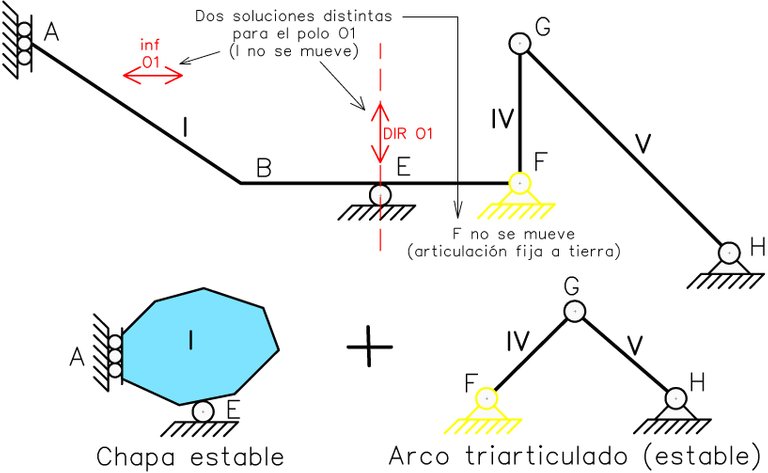
La chapa I tiene un polo absoluto ubicado en el infinito que indica que debería trasladarse verticalmente sin rotación, sin embargo, el rodillo en E indica que existe un polo en una dirección totalmente distinta a la ya mencionada, por lo que hay dos soluciones para su polo absoluto. Partiendo de la analogía de un cuadro en la pared con dos clavos en fijos en él, es imposible que una chapa o cuerpo rígido presente dos rotaciones al mismo tiempo alrededor de dos polos diferentes, por ello la chapa I está restringida de todo movimiento. Visto de manera más simple, si la chapa I solo podía trasladarse verticalmente debido al empotramiento móvil, al colocar un rodillo que restringe el movimiento vertical esta queda restringida.
La situación anterior conlleva a que el punto F (el cual pertenece tanto a la chapa I como a la chapa IV) sea un punto fijo y por lo tanto al ser F una rótula, esta sería equivalente a una articulación a tierra (en amarillo en la Fig. N°4). Esto conformaría el subsistema F-G-H comúnmente llamado “arco triarticulado”, el cual tal como se demostró anteriormente es un sistema isostático estable (GL=0).
Aplicación del 1mer TDP
A través de la aplicación del 1mer TDP, se puede llegar a las mismas conclusiones a las que se llegó anteriormente, ya que este no se cumplirá entre las chapas I, IV y V, llegando a que se tiene más de una solución para el polo absoluto de ellas, indicando que no pueden moverse. Sin embargo, realizar este análisis previo reduce las dimensiones del problema, ya que descartamos lo que no se mueve y nos centramos en lo que sí podría hacerlo.
Las chapas I, IV y V conforman un subsistema de cero grados de libertad, por lo que el resultado obtenido en la Ecuación (1) indica que la cadena cinemática de un grado de libertad puede estarse presentando entre las chapas II y III (subsistema B-C-D) al cual aplicaremos el primer teorema de los polos para hallar la posible ubicación de los polos absolutos que aún desconocemos (chapas II y III).
Observamos que en el lugar donde se encontraban las bielas paralelas se colocó un vínculo externo (empotramiento móvil en amarillo) el cual simula el comportamiento que presentarían las bielas paralelas si una de las chapas que vincula no se mueve. Este nuevo vínculo externo nos brinda una dirección en el infinito para el polo absoluto de la chapa II. Aplicaremos el primer teorema de los polos para encontrar el polo absoluto restante:

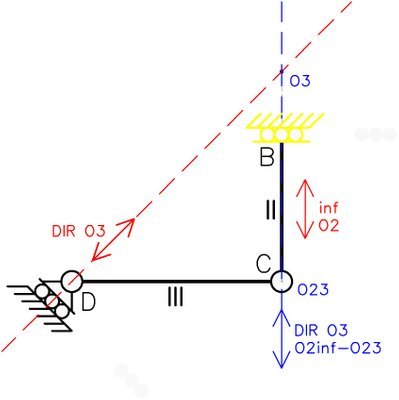
Para hallar el polo absoluto de la chapa III se intersectó la dirección brindada por el apoyo simple en D (en rojo) con la dirección brindada por el primer teorema de los polos (en azul). Al no existir otra solución conocida para el polo O3 se da por verificado el cumplimiento del 1mer TDP entre las chapas II y III.
Aquí finaliza el análisis de estabilidad, encontrando que no existen vínculos aparentes y que efectivamente el sistema material posee un grado de libertad tal como lo dice la ecuación (1), el cual se manifiesta por el movimiento del subsistema B-C-D (chapas II y III).
Ahora nos podríamos preguntar:
¿En que afecta el hecho de que ciertas chapas no se muevan?
El hecho de que parte del sistema no se mueva es irrelevante si parte de él si lo hace, evidenciando que el mismo es inestable, no total sino parcialmente.
¿Por qué se descartó la presencia de vínculos aparentes?
El resultado de la ecuación (1) fue 1, evidenciando que se necesitaría 1 unidad de vinculación adicional para que el sistema sea estable. El cumplimiento de 1mer TDP indica la presencia de una cadena cinemática de 1 grado de libertad, lo cual se comprobó. Si el resultado de la ecuación (1) hubiera sido -1 y se cumple el 1mer TDP, estaríamos ante la presencia de 2 restricciones aparentes.
Veamos otro ejemplo en el cual nos encontramos con un vínculo aparente diferente al analizado en la publicación anterior.
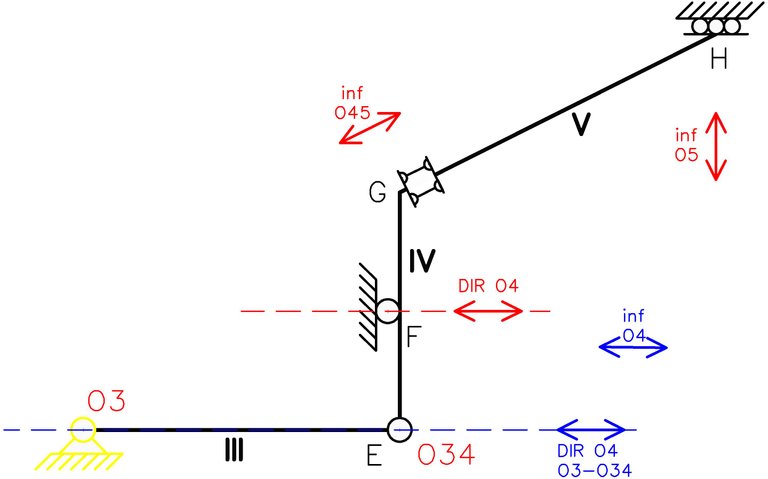
Ejemplo N°2: estudiar la estabilidad del siguiente sistema material. De existir algún vínculo aparente, indicar su ubicación.

Cabe destacar que en C existe una triple junta articulada, para calcular su grado de vinculación se aplica la ecuación (4) del artículo Determinación Algebraica de los Grados de Libertad de Sistemas Materiales en Estática Aplicada y Ejemplo de Aplicación, donde “n” representa al número de barras concurrentes en la rótula:

Este resultado debe ser verificado mediante un análisis de la estabilidad del sistema tomando en cuenta su geometría y la disposición de los vínculos.
Polos de acuerdo a restricciones y 1mer TDP

Aún no tenemos información suficiente para establecer un polo absoluto a las chapas III y IV. Antes de obtener una ubicación para estos polos mediante el 1mer TDP, procederemos a verificar si se cumple en cada parte del sistema.
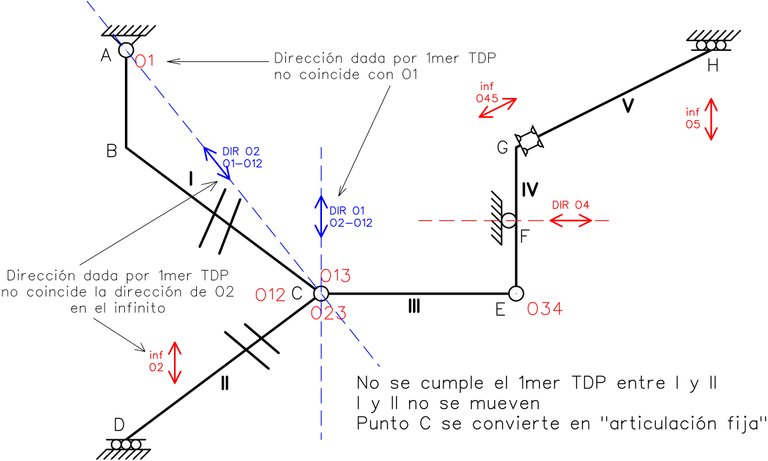

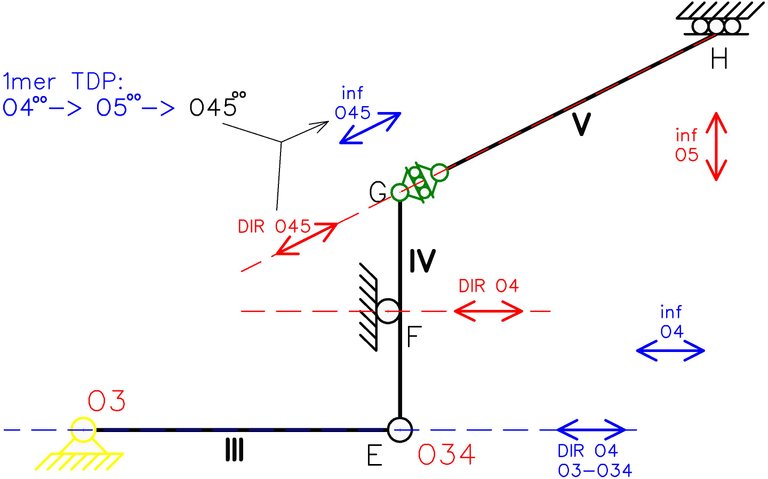
Se encuentra que las chapas I y II no se mueven porque no se cumple el 1mer TDP entre ambas (no se alinean los polos absolutos con el relativo entre ellas), por lo que el punto C pasa de ser una articulación a ser una articulación fija (en amarillo para la Fig. N°9) y por consiguiente, polo de la chapa III. Aplicamos el 1mer TDP entre III y IV para encontrar que la intersección entre la dirección dada por el “rodillo” en F y la dada por el teorema (alineación O3-O23) se encuentra en el infinito. No hay otra solución conocida para el polo O4, por lo que la chapa IV se estaría desplazando verticalmente (Fig. N°9).
Por ahora se ha cumplido el 1mer TDP entre III y IV. Sin embargo vemos que al aplicar el 1mer TDP entre IV y V, el mismo se está cumpliendo:


La teoría nos dice que la existencia de un polo relativo en el infinito (G) indica que la rotación es la misma para ambas chapas (no existe rotación relativa). Si ya asumimos que la chapa IV no puede rotar sino desplazarse (polo absoluto en el infinito), entonces la chapa V tampoco debería rotar (polo absoluto en el infinito), lo cual en efecto es lo que está sucediendo, ya que la chapa V solo puede desplazarse horizontalmente debido al empotramiento móvil en H. Dicho de otra forma, si el polo absoluto de IV y el relativo O45 están en el infinito, el 1mer TDP se cumplirá si el polo O5 también se encuentra en el infinito (solo se necesita una dirección).
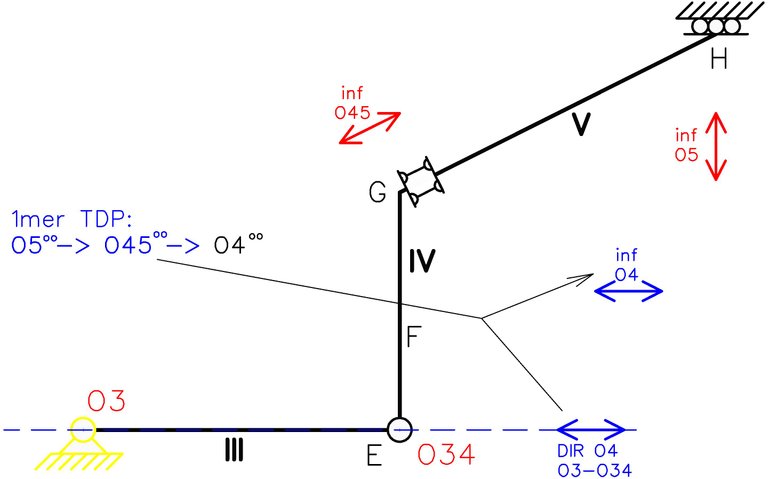
Al cumplirse el 1mer TDP, estamos en presencia de una cadena cinemática de 1 grado de libertad, por lo que existe 1 vínculo aparente en este sistema (ya que la ecuación (1) resultó en 0). Se observa cierta “redundancia” entre el 1mer TDP y la ubicación ya hallada para el polo O5 previamente, parecido en cierta forma con el vínculo aparente hallado en la Parte I de esta publicación.
Podemos encontrar el vínculo aparente por el hecho de que para encontrar la ubicación del polo O5 mediante el 1mer TDP, solo necesitaríamos conocer una dirección. El empotramiento móvil en H se puede cambiar por un apoyo simple eliminando la restricción de rotación, de esta manera tenemos un vínculo que solo aporta la dirección que necesitamos:

Por consiguiente, el vínculo aparente viene representado por la restricción de rotación de H.
Pero tal como se explicó en la publicación anterior, no existe solución única para el vínculo aparente. Podemos de igual manera eliminar la restricción de rotación de las bielas paralelas y no alterar la ubicación de los polos del sistema (si ambas chapas de desplazan el polo relativo debe de estar en el infinito y solo se necesita una dirección):
Incluso si empezáramos el análisis desde H hacia C, nos encontramos que el apoyo simple en F puede ser removido sin alterar el comportamiento del sistema:
A pesar de existir múltiples soluciones para el vínculo aparente, debe establecerse solo una. Eliminar todas las posibles restricciones aparentes simultáneamente cambiaría el comportamiento del sistema.
En base a lo estudiado hasta ahora, podemos utilizar ciertas herramientas para verificar la estabilidad de un sistema material de una manera más rápida.
Ejemplo N°3: verificar la estabilidad del sistema material mediante una inspección visual.

En la publicación anterior se estudió la estabilidad del “arco triarticulado” así como de un sistema similar que posee un empotramiento móvil. De esta manera, podemos identificar en el presente sistema material la presencia de dos sistemas estables, es decir, podemos dividir el problema en dos tal como se aprecia en la siguiente figura:
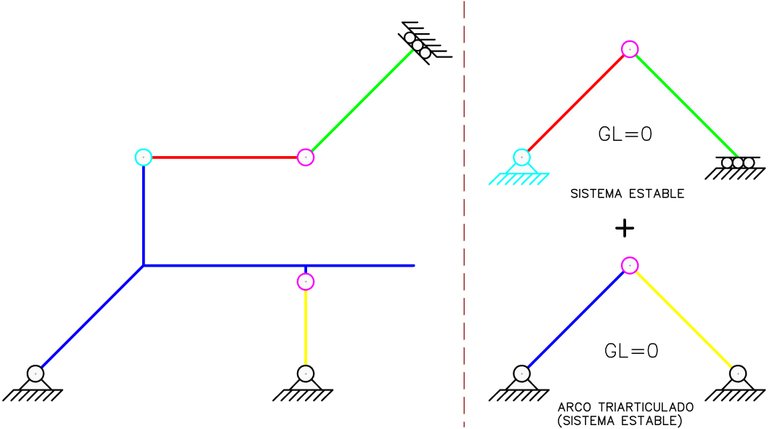
Se observa en azul y amarillo la conformación de un arco triarticulado, donde la rótula en azul celeste representa un punto fijo articulado a tierra para el otro subsistema, el cual también es estable. Podemos concluir que el sistema es estable mediante la condición mínima de estabilidad (GL=0). Al aplicar la ecuación (1) se verifica este resultado, ya que se tienen 4 chapas, 6 unidades de vinculación externas (2 articulaciones fijas y 1 empotramiento libre) y 6 unidades de vinculación}} internas (3 rótulas):

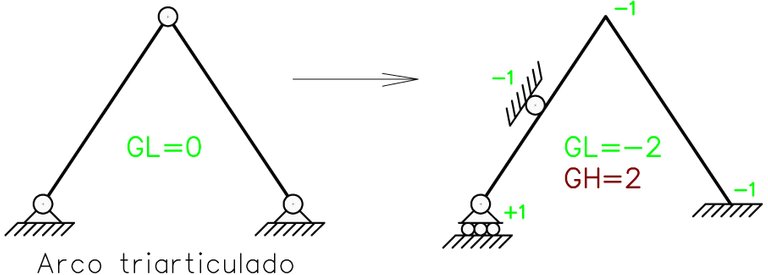
¿Qué sucede si hay vinculaciones adicionales al “arco triarticulado”?
El “arco triarticulado” es estable con el mínimo de vinculaciones (GL=0). Por lo que la presencia de una vinculación extra, al menos que esté mal dispuesta y no aporte ninguna restricción al sistema, indica que existen más vinculaciones de las necesarias para alcanzar la estabilidad (GL<0), es decir el sistema pasa de ser “isostático” a “hiperestático”. Por cada unidad de vinculación extra agregada al arco triarticulado se eleva el grado de hiperestaticidad (GH) tal como se observa en la Fig. N°15.
Conclusiones
Referencias Bibliográficas
Material recomendado
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word por @acont.
Congratulations @acont! You have completed the following achievement on the Steem blockchain and have been rewarded with new badge(s) :
You can view your badges on your Steem Board and compare to others on the Steem Ranking
If you no longer want to receive notifications, reply to this comment with the word
STOPTo support your work, I also upvoted your post!
Do not miss the last post from @steemitboard:
Vote for @Steemitboard as a witness to get one more award and increased upvotes!
This post has been voted on by the SteemSTEM curation team and voting trail. It is elligible for support from @curie and @utopian-io.
If you appreciate the work we are doing, then consider supporting our witness stem.witness. Additional witness support to the curie witness and utopian-io witness would be appreciated as well.
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Thanks for having added @steemstem as a beneficiary to your post. This granted you a stronger support from SteemSTEM.
Thanks for having used the steemstem.io app. You got a stronger support!
Hi @acont!
Your post was upvoted by Utopian.io in cooperation with @steemstem - supporting knowledge, innovation and technological advancement on the Steem Blockchain.
Contribute to Open Source with utopian.io
Learn how to contribute on our website and join the new open source economy.
Want to chat? Join the Utopian Community on Discord https://discord.gg/h52nFrV
Guao! Excelente post. Parte de una obra de consulta. Felicidades.
Gracias! @eniolw
Pues, es de gran utilidad, tal como una vez dije en un post antiguo, este contenido es dificil de hallar en libros de estática convencionales.