Saludos cordiales, le damos continuación al estudio de la Estática Aplicada siguiendo los conceptos que se abordaron en la publicación anterior: Introducción al Estudio de la Estática Aplicada, tema referente a la Ingeniería Civil, de esta manera contribuyendo con contenido académico-científico a través de la Blockchain de Steem.
Vista de todo el contenido de la asignatura en el siguiente enlace:
•Material de Estática Aplicada
Introducción
Este artículo tiene el fin de complementar las futuras publicaciones referentes al estudio de la Estática Aplicada y dar un acercamiento didáctico a un tópico muy importante en el Análisis y el Diseño de Estructuras, sin su comprensión sería una tarea infructuosa para el Ingeniero estudiar la estabilidad de una estructura, inferir su comportamiento ante la aplicación de cargas, o entender cómo se transmiten las fuerzas internas (axiales, cortantes, momentos flectores y torsores) entre los elementos de un sistema estructural. Al mismo tiempo, es indispensable tener claro el comportamiento restrictivo que cada vínculo aporta para un estudio más efectivo de temas más avanzados de Estática Aplicada, el estudiante/lector debe preguntarse ¿Que comportamiento tendría un cuerpo rígido plano (chapa) si le añado un determinado vínculo? ó ¿Qué sucedería si cambio de posición o modifico la ubicación de un vínculo?, ya que una de las principales fallas a la hora de analizar problemas más avanzados es comprender el funcionamiento de los vínculos.
Vínculos en el Plano
Es común representar diversas estructuras en el plano, esto hace más práctico su análisis con respecto a considerar las tres dimensiones, según Norris y Wilbur (1973):
“El análisis de las estructuras tridimensionales o espaciales no contiene ningún principio fundamental nuevo, respecto de los que necesitan para el estudio de las planas, pero los cálculos numéricos resultan mucho más complicados, por las características geométricas introducidas por la tercera dimensión”. (p. 69).
Por consiguiente, el estudio de las vinculaciones o conexiones entre los distintos elementos de un sistema estructural se realiza fundamentalmente en el plano, esto facilita la comprensión y el análisis de las mismas. A través de la siguiente analogía se pretende dejar una explicación más didáctica de los vínculos en el plano y su efecto:
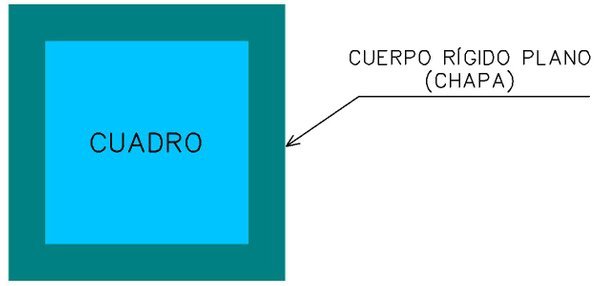
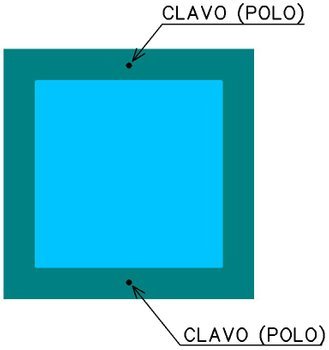
Considérese un cuadro en la pared, el mismo representa un cuerpo rígido al cual despreciaremos su dimensión más pequeña (perpendicular a la superficie de la pared), de esta manera podemos clasificar al cuadro como chapa (cuerpo rígido coplanar).
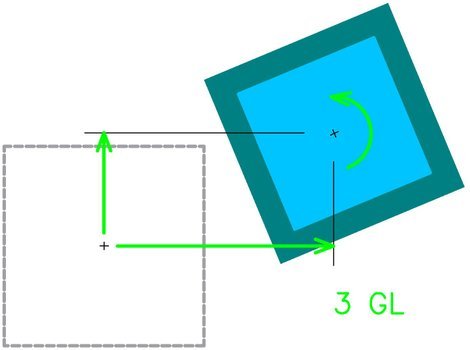
En cuanto a los grados de libertad, tenemos que el cuadro tiene la libertad de desplazarse y rotar libremente a través de la superficie de la pared si lo tomamos con una mano y le damos movimiento. Estamos despreciando los movimientos en dirección perpendicular a la superficie, es decir, el cuadro puede desplazarse horizontalmente, verticalmente y rotar, en total tres grados de libertad.
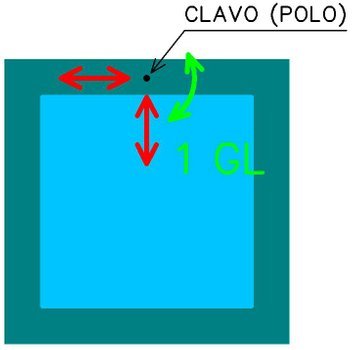
Si añadimos un clavo, estaríamos restringiéndole al cuadro la posibilidad de presentar traslación pura tanto verticalmente como horizontalmente, solo podría presentar un grado de libertad: la rotación alrededor del clavo. Estaríamos en presencia de un polo, es decir, el punto sobre el cual el cuadro gira (el clavo).
Si añadimos otro clavo, el movimiento del cuadro queda totalmente restringido.
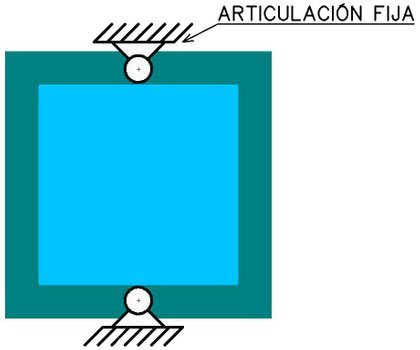
Esta situación se puede representar mediante dos apoyos articulados, tal como se ve en la Fig. N°5, vínculo que se describió en la publicación anterior (Referencia [5]), el cual cumple la función de “fijar” el cuadro respecto al sistema tierra (representado por la pared y remarcado mediante líneas diagonales adyacentes al vínculo) y permitiendo la rotación respecto a la pared.
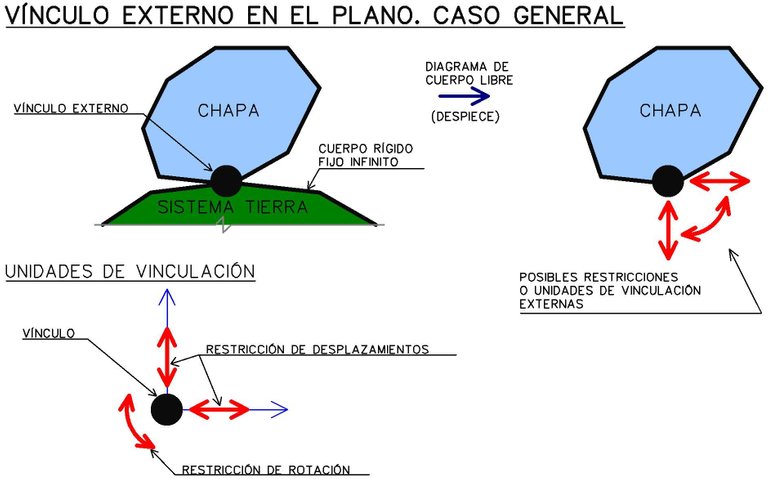
De esta manera logramos respaldar el concepto de vínculo que se tiene según Hernández (1998): “Condición geométrica que limita o restringe el movimiento de los cuerpos”. (p. 5). Lo que quiere expresar Hernández con esto, es que un vínculo cumple la función de restringir el movimiento de un cuerpo respecto a otro cuerpo, para el caso de la analogía anterior, hemos dicho que el clavo restringe parcialmente el movimiento del cuadro respecto a la pared, es decir, estamos en presencia de dos cuerpos: el cuadro y la pared. La pared puede modelarse como un cuerpo rígido infinito que no tiene posibilidad de movimiento, por lo cual podemos asumir que la misma representa un sistema de referencia fijo llamado sistema tierra. El vínculo (clavo) se encarga de restringir el movimiento del cuadro (cuerpo rígido) respecto a la pared (otro cuerpo rígido que representa al sistema tierra).
Vínculos Externos
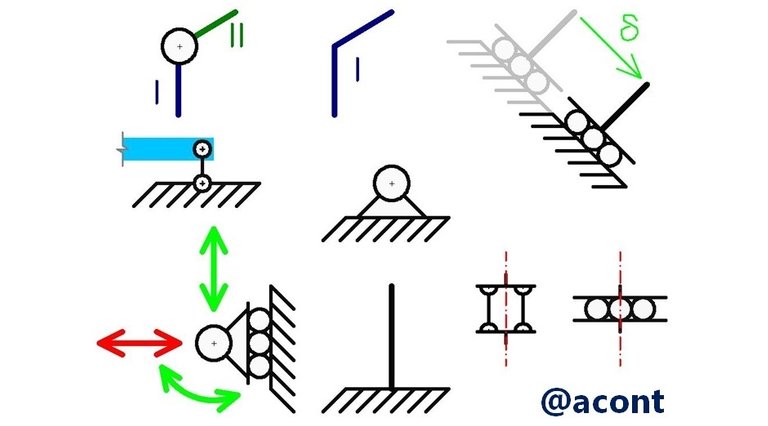
Hasta ahora hemos descrito vínculos que restringen el movimiento de un cuerpo respecto al sistema tierra, estos vínculos se denominan vínculos externos. Más adelante veremos lo que son los vínculos internos, los cuales restringen total o parcialmente el movimiento relativo entre dos cuerpos. Según Hernández (1998), los vínculos externos en el plano se clasifican en tres categorías según su grado de restricción: “De primera especie, de segunda especie y de tercera especie”. (p. 7), los cuales restringen 1, 2 y 3 movimientos respectivamente.
Ya habíamos hablado en la anterior publicación (Referencia [5]) de las unidades de vinculación (UV), no son más que el número de grados de libertad que un vínculo restringe. Recordemos que en el plano los cuerpos rígidos son láminas planas (chapas) y los vínculos poseen tres posibilidades de restricción (desplazamiento paralelo a dos ejes ortogonales y la rotación alrededor de un eje perpendicular al plano que forman estos dos ejes).
Vínculos Externos de primera especie
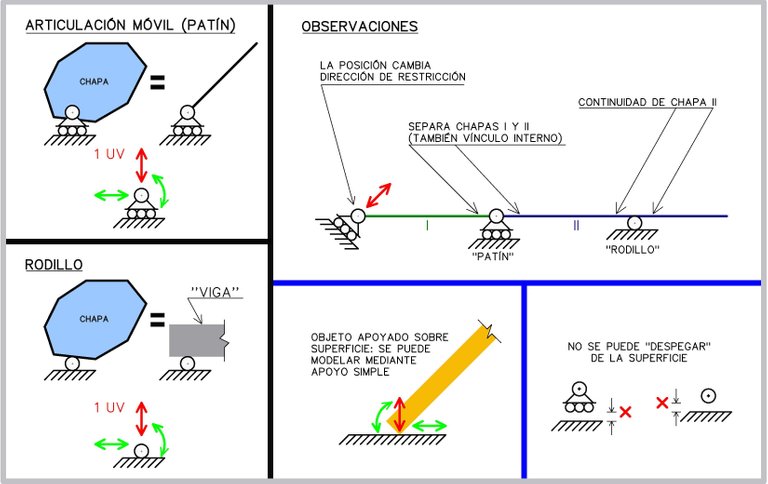
Son vínculos que poseen un grado de restricción, es decir añaden una unidad de vinculación al sistema. Ya hablamos del apoyo simple en la anterior publicación (Referencia [5]), el cual puede representarse ya sea mediante una articulación móvil (patín) o un rodillo pero cabe destacar que aunque restrinjan el mismo movimiento, no hacen exactamente lo mismo. En la Figura N°7 una descripción más detallada.
La biela simple externa, es un modelo de barra rígida de longitud despreciable cuya restricción es el desplazamiento en dirección del eje de la misma, su efecto es idéntico al de un apoyo simple por lo que se puede introducir como una representación alternativa del mismo tal como se ve en la Figura N°8. Cabe destacar que esta afirmación es solo válida para movimientos infinitésimos, según Norris y Wilbur (1979): “…para movimientos pequeños reproduce eficazmente la acción del soporte de rodillos...”. (p. 71), es decir, si imaginamos que la biela externa logra ejecutar toda su rotación entonces existiría desplazamiento de la chapa en dirección paralela a la posición inicial de la biela, lo cual no cumpliría con el concepto de apoyo simple.
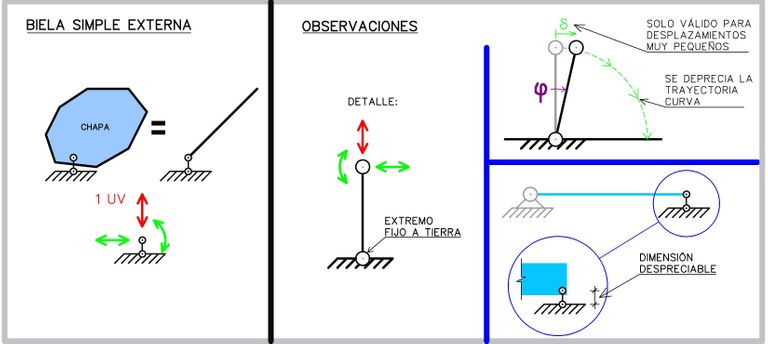
Desde el punto de vista del análisis estructural, los desplazamientos son muy pequeños en comparación a las dimensiones de una estructura, por lo que se desprecian los efectos de curvatura debido a grandes desplazamientos.
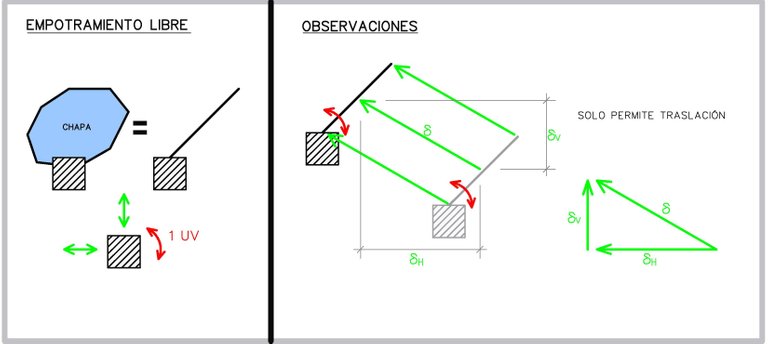
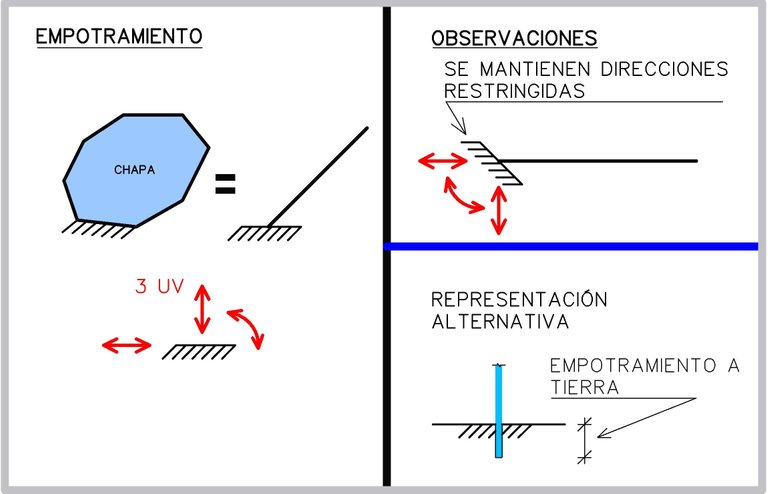
Ya vistos los vínculos externos que se usan para restringir una dirección de desplazamiento, solo nos queda hablar del que restringe únicamente la rotación: el empotramiento libre. Si se le añade este vínculo a una chapa, la misma tendría la posibilidad de presentar traslación pura en cualquier dirección pero no rotar.
Vínculos externos de segunda especie
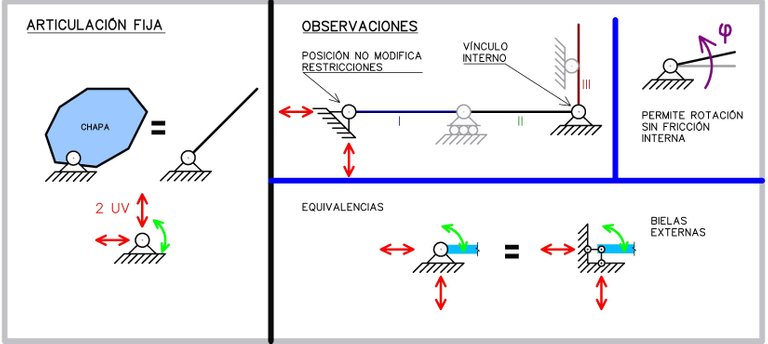
La articulación a tierra o articulación fija es uno de los vínculos más comunes. Restringe el desplazamiento en cualquier dirección del plano (generalizadas mediante dos direcciones ortogonales cualesquiera) por lo que tiene dos unidades de vinculación, permitiendo solo la rotación de la chapa respecto a tierra. En la Figura N°10 más detalles.
El vínculo externo que restringe solo un desplazamiento y la rotación es por excelencia el empotramiento móvil. Solo permite una dirección de desplazamiento la cual depende de la posición del vínculo.
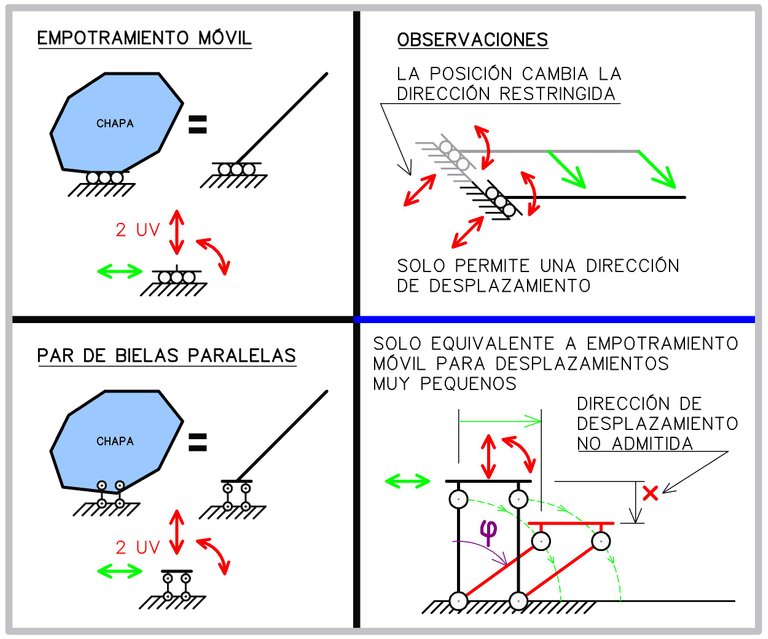
La forma alternativa de representar un empotramiento móvil es mediante un par de bielas paralelas. Análogamente con la biela simple externa su efecto solo puede considerarse similar al del empotramiento móvil para desplazamientos de muy pequeña magnitud.
Vínculos externos de tercera especie
Cuando se restringe tanto el desplazamiento en cualquier dirección como la rotación estamos en presencia de un empotramiento. Su colocación añade tres unidades de vinculación o lo que es equivalente decir reduce tres grados de libertad al sistema. Su aplicación en una chapa libre en el plano anula todo su movimiento.
Vínculos Internos
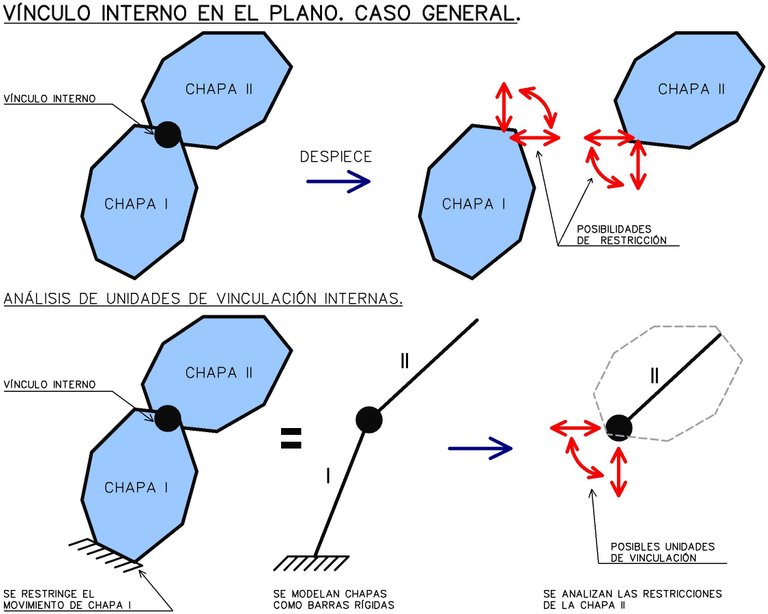
Cuando hablamos de vínculos internos, las restricciones son relativas de un cuerpo respecto a otro. Análogamente como en los vínculos externos se observa que restricción presenta un cuerpo respecto al sistema tierra, en los vínculos internos se observa que restricciones presenta un cuerpo respecto a otro cuerpo al cual está vinculado. Para conocer el grado de vinculación interna basta con fijar o restringir el movimiento de uno de los dos cuerpos y analizar qué sucede con el otro, que movimiento se restringe y que movimiento es libre de realizarse. Teóricamente se puede decir que los vínculos externos son un caso particular de los vínculos internos. Según Hernández (1998), los vínculos internos en el plano se clasifican en tres categorías según su grado de restricción: “De primera especie, de segunda especie y de tercera especie”. (p. 5), los cuales restringen 1, 2 y 3 movimientos respectivamente.
Vínculos internos de primera especie
Tenemos un apoyo simple interno, que puede ser representado de dos maneras: patín interno o el rodillo interno. Restringen solo una dirección de desplazamiento la cual va a depender de la posición del vínculo. Esta vez encontramos que ambos cumplen exactamente la misma función, no hay diferencias, permiten la rotación relativa y una dirección de desplazamiento.

La biela simple interna es una representación alternativa del apoyo simple interno, también restringe solo una dirección de desplazamiento la cual es paralela al eje de la biela. Análogamente con la biela simple externa, la misma representa un modelo infinitesimal de barra rígida articulada en sus extremos con dos chapas de tamaño finito y su categorización como apoyo simple interno se cumple solo si los desplazamientos que sufre el sistema son lo suficientemente pequeños para despreciar la trayectoria curva que se generaría si se dan rotaciones de gran magnitud. Cabe aclarar que en el estudio de la estática aplicada los vínculos tienen dimensiones despreciables y solo representan la forma en que un cuerpo está vinculado respecto a otro.
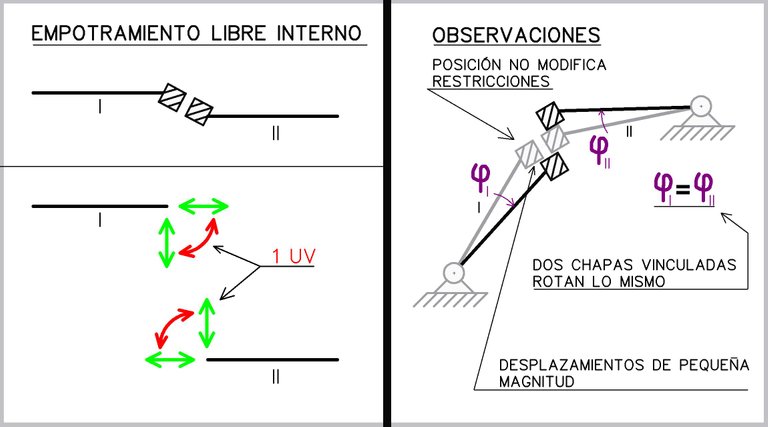
Pasamos al vínculo interno de primera especie encargado de restringir solo la rotación relativa: el empotramiento libre interno. Al ver la similitud que se viene presentando con los vínculos externos, se empieza a reforzar la afirmación de que los vínculos externos no son más que un caso particular de los vínculos internos. Según Hernández S. (1998): “El lector debe estar consciente que más importante que la forma de indicar el vínculo, hecho este en cual se difiere con regularidad, esta todo el aspecto teórico que encierra”. (p. 7). Teóricamente, se debe tomar en cuenta que al no permitir la rotación relativa, ambas chapas están destinadas a rotar de forma similar, es decir, si una de las chapas sufre una rotación, la otra debe presentar la misma magnitud y sentido de rotación, pero si una no puede rotar entonces la otra tampoco.
Vínculos internos de segunda especie
Articulación o rótula: su función es permitir la rotación relativa entre chapas restringiendo cualquier desplazamiento relativo. ¿Entre chapas? Si, también pueden vincularse más de dos chapas. Si una de dos chapas vinculadas entre sí por una articulación se restringe de todo movimiento la articulación pasa a ser un punto fijo sobre el cual la otra chapa puede rotar, es decir, se convierte en un polo para esta chapa, por esta razón este vínculo representa un polo relativo o en otras palabras un punto de velocidad cero entre ambas chapas.

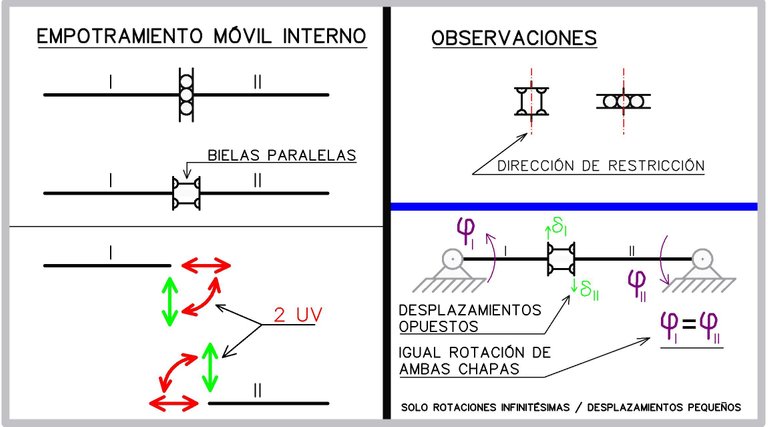
Empotramiento móvil interno o par de bielas paralelas: cuando se restringe la rotación relativa y solo una dirección de desplazamiento entre dos chapas, estamos en presencia de este vínculo, el cual es muy temido por los estudiantes por su dificultad para el análisis tanto en el estudio de la estabilidad de sistemas materiales como para el cálculo de reacciones externas e internas mediante ecuaciones de equilibrio. De nuevo cabe decir que la equivalencia entre uno y otro es solo válida para desplazamientos muy pequeños debido a la posibilidad que presentan las bielas paralelas internas de presentar una componente de desplazamiento en dirección de la posición inicial de las mismas, es decir, si imaginamos que ambas bielas sufren una rotación significativamente grande entonces la dirección de restricción cambiaría con respecto a la inicial, ya que la misma es paralela a las bielas, y el estudio de estos mecanismos no está dentro del enfoque de la Estática.
Vínculos internos de tercera especie
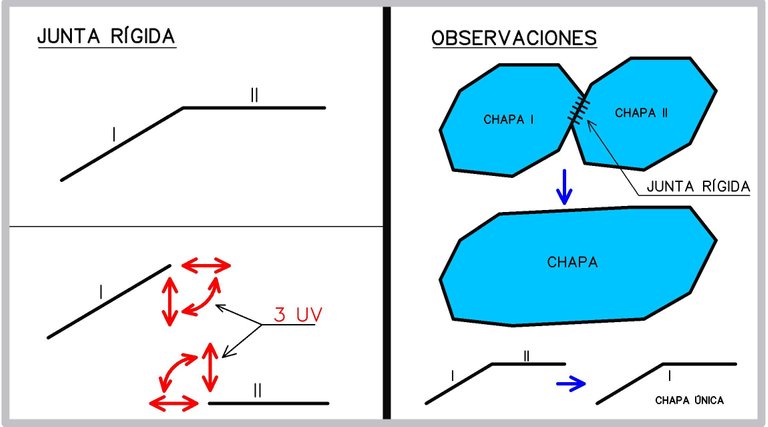
Cuando se vincula al sistema tierra un cuerpo imposibilitando todo su movimiento se suele representar mediante un vínculo externo de empotramiento las restricciones que el cuerpo posee. Esta restricción también puede suceder entre dos o más cuerpos mediante una junta rígida o nodo rígido. Una particularidad de este vínculo interno es que puede unir dos o más cuerpos rígidos y hacerlos uno solo. Ya que permite conservar la rigidez de todo el conjunto y recordando el concepto de cuerpo rígido:
“Un conjunto infinito de puntos que unidos entre si logran conformar un cuerpo, los cuales están unidos uno de otro bajo total restricción de movimiento. Es decir, la distancia entre dos puntos cualesquiera de un cuerpo rígido permanece constante o inalterable si el mismo sufre un movimiento cualquiera o es sometido a cualquier conjunto de fuerzas externas” Referencia [5].
Entonces podemos afirmar que este vínculo no solo restringe todo movimiento relativo sino que permite extender los límites de una chapa y crear un cuerpo rígido plano único.
Estos han sido todos los vínculos que pueden presentarse teóricamente hablando si tomamos en cuenta todas las posibles restricciones en el plano. En la vida real puede que algunos de estos vínculos no tengan una aplicación práctica, pero conocer su comportamiento corresponde a una mayor versatilidad para el Ingeniero Estructural a la hora de analizar problemas.
Hemos hablado de los vínculos como una representación idealizada de restricciones puntuales en el plano, pero cabe destacar que esta restricción puede ser lineal como es el caso de las losas apoyadas sobre vigas donde la viga restringe el movimiento de la losa a lo largo de la propia viga y esta restricción puede ser modelada mediante un apoyo simple o incluso empotrada, además de restricciones superficiales, como puede ser el contacto suelo-losa de fundación o suelo-muro de contención. Ciertos apoyos en estructuras pueden modelarse como "resortes" los cuales dependen de la rigidez del mismo pero estaríamos tomando en cuenta deformaciones. Estas condiciones abarcan temas más avanzados de estructuras y estática aplicada nos centraremos en los vínculos puntuales.
Ahora vamos aclarar algo que se mencionó en varias ocasiones a lo largo de la descripción de los vínculos en el plano: lo movimientos infinitesimales y la validez de representar un vínculo de una manera u otra.
Movimientos Infinitésimos
Como ya se mencionó, los desplazamientos en estructuras son muy pequeños en comparación a las dimensiones de las mismas, por ello debemos pensar en los vínculos como condiciones restrictivas que pueden admitir cierto grado de desplazamiento y/o rotación y no como mecanismos diseñados para permitir grandes desplazamientos. Según Rodríguez (2003): “Considérese una chapa…que rota un ángulo “φ” alrededor de un punto…considerando que la rotación “φ” es infinitésima…”. (p. 17). Cuando se habla de movimientos infinitésimos, la magnitud de la rotación que puede sufrir una chapa es de orden infinitesimal, esto genera desplazamientos muy pequeños en los puntos de la misma, haciendo que se desprecien los efectos de trayectoria curva. De esta manera, en el caso de la Figura N°20 el desplazamiento de los puntos B y C será únicamente horizontal ya que se desprecia la componente vertical del movimiento de los mismos.
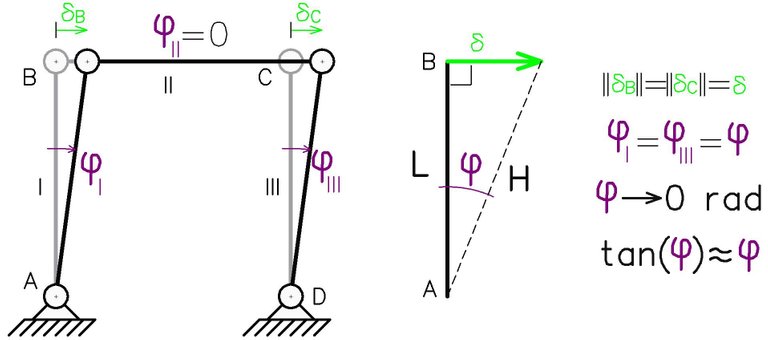
Si tomamos el triángulo que se genera con el radio vector AB y el vector desplazamiento del punto B, y tomamos en cuenta que para ángulos muy pequeños la tangente es igual a la magnitud del ángulo, entonces podemos llegar a la siguiente expresión:
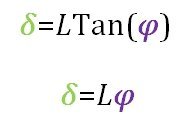
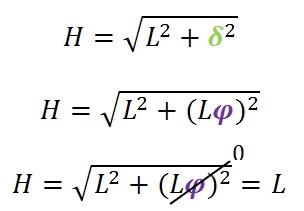
Así entonces se cumple la validez de representar ciertos vínculos de una manera u otra y se cumple la hipótesis de que las chapas son indeformables, ya que al presentarse una rotación tan pequeña la hipotenusa del triángulo en la Figura N°20 se puede asumir de prácticamente igual magnitud que la longitud original de la chapa, es decir, podemos asumir que no se está deformando.
Aplicación a Sistemas Estructurales en la Realidad
Si bien en la realidad no existen condiciones ideales de desplazamiento o rotación sin fricción o fuerza que se oponga al movimiento, los apoyos y las conexiones entre elementos estructurales se pueden modelar con suficiente exactitud mediante vínculos idealizados. Según expresa Hibbeler (2012): “Al seleccionar un modelo concreto para cada soporte o junta, el ingeniero debe estar consciente de cómo afectarán los supuestos al desempeño real de los elementos y si los supuestos son razonables para el diseño estructural”. (p. 35). Por consiguiente el ingeniero estructural debe seleccionar un modelo que se corresponda con la realidad y obtener resultados que garanticen la seguridad y un buen desempeño de la estructura durante su vida útil. Es por ello que un buen criterio en el diseño estructural es indispensable y la comprensión de los vínculos en el plano facilita este trabajo.
Las estructuras se diseñan para mantenerse de pie, estables, lo ideal sería que fueran totalmente rígidas y resistan cualquier carga externa que se les aplique sin que la estructura sufra movimiento alguno, pero esto acarrea elevados costos de construcción por la cantidad de materiales que debe de usarse para garantizar esta rigidez y los problemas que esto conlleva. Según expresa Hibbeler (2012):
"Los elementos estructurales de unen de diversas maneras dependiendo de la intención del diseñador. Los tres tipos de juntas que se especifican con mayor frecuencia son la junta articulada, el soporte de rodillo y la junta fija. Las juntas articuladas y los soportes de rodillo permiten cierta libertad de rotación, en tanto que una junta fija no permite la rotación relativa entre los elementos conectados y, en consecuencia, su fabricación es más costosa". (p. 34).
Además, permitir ciertos grados de libertad en las juntas de una estructura puede traer consigo ventajas con respecto a una estructura completamente rígida en sus juntas, como por ejemplo, la manera en que se transmiten las fuerzas internas entre elementos, evitar que se generen fuerzas debido a la expansión o contracción por cambios de temperatura o asegurar la estabilidad con un menor número de restricciones (unidades de vinculación).
Veamos un ejemplo común de junta rígida: la unión viga-columna en estructuras de concreto armado (Figura N°21). Podemos asumir que es despreciable la rotación relativa entre viga y columna, ya que están vinculadas por un nodo del mismo material y por las características del concreto.
 Figura N°21: la conexión entre las vigas y las columnas puede modelarse mediante una junta rígida. | Foto de Phil Roeder en Foter.com / CC BY
Figura N°21: la conexión entre las vigas y las columnas puede modelarse mediante una junta rígida. | Foto de Phil Roeder en Foter.com / CC BYEn cuanto a estructuras de acero, la idealización de las conexiones va a depender de que tanta rotación relativa admita la junta, si la misma admite rotaciones de magnitud significativa entonces se puede modelar como articulación o rótula, sino se trataría como junta rígida, el límite lo establecen las Normas especializadas para la construcción en acero y el criterio del ingeniero. Para estructuras de madera según expresa Hibbeler (2012):
“Para la mayoría de las estructuras de madera, se supone que todos los elementos deberán ser articulados ya que el hecho de atornillarlos o clavarlos no es suficiente para restringir la rotación de un elemento con respecto a los demás”. (p. 35).
 Figura N°22: en estructuras de acero, las conexiones entre elementos suelen ser una placa de rigidez relativamente menor a la de los elementos, por lo que pueden permitir una rotación relativa significativa entre los mismos, esto puede modelarse mediante una rótula. | Foto de Elsie esq. en Foter.com / CC BY
Figura N°22: en estructuras de acero, las conexiones entre elementos suelen ser una placa de rigidez relativamente menor a la de los elementos, por lo que pueden permitir una rotación relativa significativa entre los mismos, esto puede modelarse mediante una rótula. | Foto de Elsie esq. en Foter.com / CC BY Figura N°23: las barras diagonales están articuladas a la viga de acero superior en su parte media, esto se evidencia al ver que las mismas están unidas mediante pernos a una placa que sobresale. | Foto de Yolanda Arango en Foter.com / CC BY-SA
Figura N°23: las barras diagonales están articuladas a la viga de acero superior en su parte media, esto se evidencia al ver que las mismas están unidas mediante pernos a una placa que sobresale. | Foto de Yolanda Arango en Foter.com / CC BY-SA Figura N°24: cuando una junta corresponde a la continuidad de un elemento de acero (parte superior de la estructura) estamos en presencia de una junta rígida. También se considera junta rígida en acero cuando la unión entre los elementos es no solamente mediante pernos sino mediante soldadura y otras medidas que reduzcan la posibilidad de presentarse rotación relativa. | Foto de U.S. Army Corps of Engineers Los Angeles District en Foter.com / CC BY-ND
Figura N°24: cuando una junta corresponde a la continuidad de un elemento de acero (parte superior de la estructura) estamos en presencia de una junta rígida. También se considera junta rígida en acero cuando la unión entre los elementos es no solamente mediante pernos sino mediante soldadura y otras medidas que reduzcan la posibilidad de presentarse rotación relativa. | Foto de U.S. Army Corps of Engineers Los Angeles District en Foter.com / CC BY-NDEn cuanto a vínculos externos o soportes, un buen ejemplo de empotramiento sería una fundación superficial en concreto armado, asumiendo que se encuentra sobre suelo firme, la misma restringe todo movimiento de la columna respecto a tierra (Figura N°25). Cuando un soporte permite cierta rotación se puede modelar como articulación fija, un ejemplo representativo sería en puentes (Figura N°26).


Los apoyos simples son también muy comunes, los puentes usualmente poseen un extremo articulado a tierra y otro simplemente apoyado, esto es, entre otras razones, para permitir la libre expansión térmica debido a temperatura. Una viga puede estar simplemente apoyada de una columna tal como se aprecia en la Figura N°29, el soporte que sobresale de la columna se denomina comúnmente ménsula.
 Figura N°27: ejemplo de apoyo simple en puente. | Foto de Patrick Feller en Foter.com / CC BY
Figura N°27: ejemplo de apoyo simple en puente. | Foto de Patrick Feller en Foter.com / CC BY Figura N°28: ejemplo de rodillo en vigas de concreto armado. | Foto de Patrick Feller en Foter.com / CC BY
Figura N°28: ejemplo de rodillo en vigas de concreto armado. | Foto de Patrick Feller en Foter.com / CC BY Figura N°29: otro ejemplo de rodillo. | Foto de Patrick Feller en Foter.com / CC BY
Figura N°29: otro ejemplo de rodillo. | Foto de Patrick Feller en Foter.com / CC BYOtros Vínculos (no convencionales)
Algunos de los vínculos abordados en esta publicación son de poca o nula utilización en modelos estructurales reales, existen en la teoría pero no tienen un uso práctico en la realidad, tal vez tengan su aplicación en problemas muy puntuales. Debido a esto los vínculos no convencionales no se encuentran definidos en muchas bibliografías referentes a la estática o estructuras, sin embargo, entenderlos amplía la versatilidad del ingeniero estructural en cuanto a aspectos de análisis y diseño pues está en la capacidad de modelar sistemas de vinculación estructurales más complejos. En el futuro, quizás las estructuras podrían cambiar de alguna manera u otra y el uso de estos vínculos hacerse más frecuente.
Conclusiones
- Podemos describir los vínculos en el plano como una representación idealizada de restricciones puntuales de desplazamiento y/o rotación.
- En las estructuras, se deben pensar en los vínculos como condiciones restrictivas que pueden admitir cierto grado de desplazamiento y/o rotación y no como mecanismos que admiten grandes movimientos.
- Algunos vínculos pueden cambiar sus condiciones de restricción al cambiar la posición de los mismos, mientras que otros mantienen sus propiedades restrictivas.
- Los vínculos externos (chapa-sistema tierra) son un caso particular de los vínculos internos (chapa-chapa).
- En las estructuras, la rotación que puede permitir un vínculo es de orden infinitesimal y los desplazamientos de pequeña magnitud.
- El modelado de un sistema estructural se puede realizar con suficiente exactitud mediante vínculos idealizados.
- El Ingeniero debe estar consciente de cómo el modelo seleccionado de vinculaciones para un sistema estructural afecta al desempeño de la misma y los elementos que la componen.
- Los vínculos externos más frecuentes en las estructuras son el empotramiento, la articulación fija y el apoyo simple, y los internos son la junta rígida y la rótula.
- Comprender todas las posibles formas de vinculación de las chapas en el plano corresponde a una mayor versatilidad del ingeniero para el análisis y diseño, así como también una base fundamental para el estudiante de estática aplicada a la Ingeniería Civil.
Material Consultado
[1] Hernández, Suilio. (1998). Estática Aplicada. Caracas, Venezuela: Folleto Editado por el Departamento de Ingeniería Estructural U.C.V.
[2] Hibbeler, R. C. (2012). Análisis Estructural. México: PEARSON EDUCACIÓN.
[3] Norris C. H. y Wilbur J. B. (1973). Análisis Elemental de Estructuras. México: Libros McGraw-Hill de México.
[4] Rodríguez, Iván. (2003). Estática de las Estructuras. Venezuela.
[5] @acont. Introducción al Estudio de la Estática Aplicada. Disponible en: https://steemit.com/stem-espanol/@acont/introduccion-al-estudio-de-la-estatica-aplicada
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word por @acont. Otras imágenes presentan su fuente respectiva.
Excelente @acont, muy buen aporte para la comunidad científica y universitaria, muy buena tu diagramación, te felicito!! Saludos cordiales!!
Hola! @reinaseq gracias por tu comentario, precisamente una de las cosas que trato de hacer es ilustrar con la mayor claridad y detalle posible, explicando cosas que normalmente el lector (en este caso estudiantes) debe inferir por su cuenta y así optimizar el aprendizaje.
Saludos Ángel (@acont). Tu post se ve muy bien. Demuestra dedicación! Está un poco extenso. Quizá podrías considerar a futuro separar en varios posts contenidos extensos como este. Bienvenido a la etiqueta.
Te invito a unirte al servidor en Discord de #STEM-Espanol, donde puedes participar y recibir más feedback.
Hola @eniolw gracias por el comentario, no pensé mucho en la extensión de este post, lo consideraré de ahora en adelante, sucede que quería incluir también aplicaciones a la realidad y no dejarlo solo en la teoría. Saludos!
This post has been voted on by the SteemSTEM curation team and voting trail in collaboration with @curie.
If you appreciate the work we are doing then consider voting both projects for witness by selecting stem.witness and curie!
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Excelente artículo estimado @acont. Todo muy bien explicado, lo cual facilita la comprensión de conceptos básicos de la estática y por consiguiente del análisis estructural. Super didáctica la presentación de las ideas. Felicidades compañero, saludos!
Gracias estimado @eliaschess333, este post lo pensé para ser una referencia a futuras publicaciones, además es necesario conocer el comportamiento y el aspecto conceptual de cada vínculo para un mejor desempeño en el estudio general de la Estática, por eso les dediqué un artículo entero. Saludos!
Congratulations @acont! You have completed the following achievement on the Steem blockchain and have been rewarded with new badge(s) :
Click on the badge to view your Board of Honor.
If you no longer want to receive notifications, reply to this comment with the word
STOPDo not miss the last post from @steemitboard: